В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Обычно положительный и отрицательный расход канала можно регулировать по отдельности. Но, как мы уже говорили, для квадрокоптеров принципиально важна симметрия рабочего хода, поэтому и расходы следует подстраивать только симметрично. При настройке квадрокоптера расходами подгоняют минимальное и максимальное значение длительности импульса под необходимые для контроллера. А остроту реакции коптера на управление задают при помощи специального коэффициента Rate в настройках полетного контроллера.
Еще одним параметром, существенно влияющим на качество и комфорт пилотирования, является экспонента— степень нелинейности отклика системы на изменение управляющего сигнала. Строго говоря, эта зависимость получила такое название по причине визуальной похожести на график экспоненты у= е х. На самом деле механизм формирования нелинейного отклика несколько сложнее. Чтобы не загружать микроконтроллер пульта вычислениями степенной функции в режиме реального времени, в память микроконтроллера записывается готовая таблица значений некой степенной функции
где х — это значение отклонения рукоятки; k — коэффициент пропорциональности.
Во время работы пульта значения из этой таблицы накладываются на линейную зависимость по формуле

где N — это процент экспоненты в настройках пульта. Проще говоря, чем больше процент экспоненты N , тем сильнее "искривляется" линейная зависимость в соответствии со значениями из таблицы (рис. 2.10).
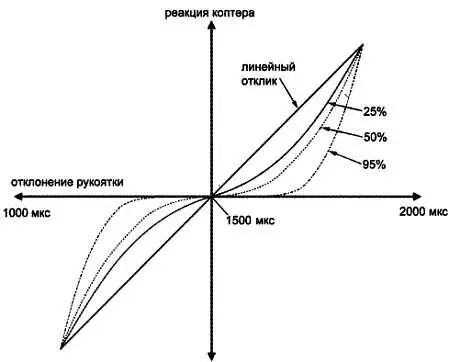
Рис. 2.10. Экспонента сигнала управления
Наличие экспоненты позволяет мягко и комфортно управлять моделью в районе небольших отклонений рукояток, но в то же время при необходимости резко воздействовать на модель, парируя порыв ветра или выполняя вираж. Глубину экспоненты каждый пилот настраивает под себя и для каждой модели в отдельности.
В общем случае рекомендуется увеличивать экспоненту для начинающих пилотов, склонных к нервным и суетным подергиваниям рукояток пульта, и уменьшать вплоть до полной линейности отклика для воздушной акробатики.
Примечание
Применительно к мультикоптерам, глубина экспоненты задается в настройках контроллера, а в настройках пульта экспоненты быть не должно. Экспоненты пульта и контроллера не должны накладываться на сигнал одновременно.
Как вы уже поняли, общая концепция радиоуправления коптером такова: пульт должен передать максимально точные и стандартные "сырые" сигналы управления, а всю дальнейшую обработку будет выполнять полетный контроллер на основе своих настроек.
Конвертер PPM-SUM
У многоканальной системы с раздачей широтно-модулированных импульсов по раздельным выходным каналам есть принципиально неустранимые недостатки. Во-первых, отдельный сигнальный провод для каждого канала. Это особенно актуально для 12- или 14-канальных систем. В этом случае миниатюрный приемник соединяется с полетным контроллером и прочими бортовыми устройствами толстым жгутом проводов, неэстетичным и весящим больше, чем сам приемник. Однако полетный контроллер может и сам декодировать "сырой" РРМ-сигнал, при условии, что он выведен на отдельный выход приемника.
Во-вторых, низкая стабильность и точность управляющего сигнала, обусловленная необходимостью лишних преобразований из одного типа сигнала в другой. Было бы логично передать цифровое значение, соответствующее положению рукоятки пульта, по радиоканалу и затем из приемника переслать в исполнительное устройство без лишних преобразований. Однако для обработки цифрового сигнала исполнительное устройство должно обладать собственными вычислительными ресурсами. Но возможность выпускать такие устройства массово и недорого возникла лишь относительно недавно, с появлением дешевых и миниатюрных микроконтроллеров. Поэтому в традиционной системе приемник в любом случае преобразует цифровой сигнал в импульсы определенной длительности на выходе канала. Несмотря на то, что импульс представлен двоичными уровнями сигнала "0" и "1", физическая длительность импульса — это аналоговый параметр. То есть, на этапе передачи-приема мы имеем преобразование из аналогового сигнала в цифровой и обратно в аналоговый.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.