Иван Хорбенко - Звуки в морских глубинах
Здесь есть возможность читать онлайн «Иван Хорбенко - Звуки в морских глубинах» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1962, Издательство: Воениздат, Жанр: sci_popular, military_weapon, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Звуки в морских глубинах
- Автор:
- Издательство:Воениздат
- Жанр:
- Год:1962
- Город:Москва
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Звуки в морских глубинах: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Звуки в морских глубинах»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Но есть еще и на нашей «обжитой» планете Земля много неизученных «белых пятен», среди них почти неизвестный на всю его глубину Мировой океан с его подводными горами и впадинами, со своим растительным и животным миром, со своими физическими законами. В изучении его большую пользу приносит гидроакустика — сравнительно молодая наука, имеющая большое будущее.
Эта наука имеет большое прикладное значение. Современные подводные корабли не могут обойтись без гидроакустических приборов, которые являются «ушами» и «глазами» подводных лодок. Гидроакустические приборы необходимы также и для мореплавания и рыболовства.
О том, что такое гидроакустика, как устроены гидроакустические приборы и как гидроакустика служит нам в мирных и военных целях, рассказывает автор в этой книге.
Звуки в морских глубинах — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Звуки в морских глубинах», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Уклоняющаяся от преследования подводная лодка выпускает с кормовой части имитатор цели, хорошо отражающий ультразвук (рис. 44).
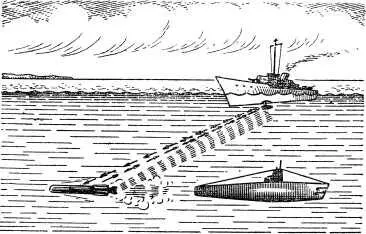
Рис. 44. Появилась новая цель — это подводная лодка выпустила имитатор при уклонении от преследования .
Некоторые имитаторы снабжены устройством, создающим шум, напоминающий шум винтов подводной лодки. Такой имитатор может несколько часов самостоятельно передвигаться, имитируя маневр уклоняющейся подводной лодки. Длина имитатора более трех метров, диаметр около 0,5 метра. Маневрирует имитатор по сигналам программного механизма.
Малоопытный гидроакустик может переключиться на работу по ложной цели, а в это время подводная лодка уйдет от преследования.
Ложную цель можно создать также очень простым способом — выпуском воздушного пузыря. Мелкие пузырьки воздуха, как мы знаем, хорошо отражают ультразвук, что может временно дезориентировать гидроакустика.
В иностранных флотах проводятся опыты по уменьшению отражающей способности ультразвука подводной лодки, для чего корпус ее покрывают специальными противоотражающими покрытиями, которые поглощают более 90 процентов ультразвуковой энергии. Недостатком таких покрытий является то, что они обладают большим поглощающим свойством только для определенных частот, а для других частот отражающие свойства могут возрасти.
Поиск цели
До появления гидроакустических станций поиск подводных лодок производился зрительными средствами. Вооруженные биноклями наблюдатели внимательно следили за горизонтом: не появится ли перископ подводной лодки, которая также не имела гидроакустической станции и вынуждена была выходить в атаку по данным наблюдения в перископ.
С появлением гидроакустических станций отпала необходимость подводным лодкам поднимать перископ над поверхностью моря. Следовательно, подводную лодку можно обнаружить только гидролокатором.
При поиске подводной лодки гидроакустическая станция надводного корабля работает в режиме эхопеленгования, т. е. через определенные промежутки времени делаются посылки ультразвуковых сигналов.
Поиск ведется при вращении вибратора с левого борта к носу, а затем то же с правого борта и т. д. Такой поиск называется симметричным поиском (рис. 45, а ). Шаг поиска может быть различным, например, 5 или 10°. После каждой посылки акустическая система поворачивается на соответствующий угол.
Если вероятность обнаружения подводной лодки больше с какого-нибудь борта, то ведется асимметричный поиск (рис. 45, 6 ), т. е. с одного борта сектор увеличивается, а с другого уменьшается.
При вероятности появления подводной лодки прямо по курсу поиск ведется с перекрытием носовых курсовых углов (рис. 45, в ). В этом случае носовой сектор обследуется дважды.
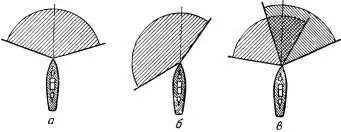
Рис. 45. Виды гидроакустического поиска подводной лодки: а — симметричный; б — асимметричный; в — с перекрытием носовых курсовых углов.
При поиске шагом 5 или 10° на обследование сектора уходит много времени. Пока гидроакустик ведет поиск с одного борта, подводная лодка может приблизиться с другого борта на дистанцию торпедного залпа. Поэтому поиск подводных лодок более выгодно вести гидролокационной станцией кругового обзора. Такая станция не только обеспечивает быстрое обследование сектора, но и обнаруживает одновременно все цели, которые могут оказаться в зоне действия станции.
При попадании подводной лодки в зону действия гидролокатора от нее отразятся ультразвуковые волны и гидроакустик услышит эхо. После получения эха от второй посылки гидроакустик докладывает командиру корабля направление на цель и дистанцию до нее.
Получив приказание классифицировать контакт, гидроакустик определяет протяженность цели, тон эха, изменение пеленга и четкость записи на рекордограмме. Пеленгуя левый и правый срезы, он определяет средний пеленг на цель и докладывает командиру корабля.
Гидроакустик подводной лодки в это время тоже не бездействует. Он внимательно пеленгует шум винтов преследующего корабля и докладывает командиру подводной лодки направление и по силе звука ориентировочно определяет, сближается корабль или удаляется.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Звуки в морских глубинах»
Представляем Вашему вниманию похожие книги на «Звуки в морских глубинах» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Звуки в морских глубинах» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.