Петр Силин - Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная
Здесь есть возможность читать онлайн «Петр Силин - Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. ISBN: , Жанр: Прочая научная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:9785449840837
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
– выработкой алгоритма достижения цели и его конкретизация в управляющие команды;
– доведение управляющих команд до исполнительных органов;
– инерционность исполнительных органов в реализации управляющих команд не добавляет новых нюансов по сравнению с простыми системами с интегрированными системами управления.
В дальнейшем, при рассмотрении движения объектов в пространстве состояний будет пониматься обобщенная величина меры инерции И 0 , учитывающая в каждом конкретном случае, в соответствии со статьей 5, возможные влияния тех или иных особенностей объектов или способов определения инерционности.
1.7.2. Оценка движения объектов в пространстве состояний.
После того, как (объект) субъект тем или иным способом обретет цель, он начинает двигаться к ней. Следует отметить, что появление цели у объекта может быть, как принципиальным фактором, так и результатом совокупности случайных событий.
Обретение цели субъектом является сложным и, в определенной степени, неоднозначным процессом:
– абсолютно пассивные объекты, лишенные собственной системы управления, приобретают целевую функцию как результат суперпозиции внешних воздействий;
– объекты, снабженные простой системой управления (без когнитивных функций) способны противодействовать внешним воздействиям с тем, чтобы препятствовать недопустимому изменению контролируемых параметров. Слишком сильное внешнее воздействие может преодолеть противодействие системы управления с угрозой разрушения объекта по указанным параметрам;
– объекты, снабженные когнитивными системами, являются участниками (т.е. субъектами) взаимоотношений. Система управления таких объектов решает проблемы не только удержания параметров системы в контролируемых пределах, но и вопросы фиксации параметров субъекта как единого целого в пространстве состояний, образуемом системой взаимоотношений данного субъекта и окружающего мира. Это означает, что назначение цели субъекту является результатом некоторого компромисса между целями, предлагаемыми окружающим миром, и целями, которые самостоятельно назначает себе субъект.
Для характеристики движения обычно используются такие показатели как расстояние до цели, скорость перемещения к цели, прогнозируемое время достижения цели, средняя скорость движения в обобществленном пространстве состояний, точность достижения цели.
Дополнительно, если позволяет нелинейность выражений для скоростных показателей, могут применяться такие показатели как ускорение (первая производная), тенденция (вторая производная или ускорение ускорения).
Также производится оценка инерционных свойств объекта.
1.7.2.1. Расстояние.
При оценке показателей расстояния следует учитывать следующее:
A) общее расстояние до цели. Субъекту в пространстве состояний для достижения цели не всегда пригодно прямое направление от точки старта до точки финиша. Как правило, субъект вырабатывает некоторый алгоритм достижения цели, состоящий из ряда прямолинейных этапов, при этом концы отрезков именуются задачами или узловыми точками. Если таких этапов несколько ( D ), длина каждого этапа составляет величину L d , то общее расстояние до цели может быть определено выражением (27) как сумма этапов:
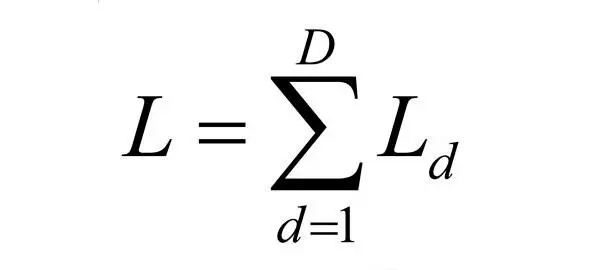
выражение 27
B)следует отметить, что полноценный учет пройденного расстояния субъектом в пространстве состояний важен с точки зрения поведения ресурсозависимых параметров, так как, если в качестве пройденного расстояния принять расстояние между стартом и целью, определяемое длиной прямой, проложенной между ними, то будет неверной оценка конечного состояния ресурсозависимых параметров, да и состояние самих ресурсных параметров будет не совпадать с прогнозируемыми значениями;
C)если учесть, что каждый этап в пределах пространства состояний может быть выражен интервалом значений того или иного параметра (см. 14/1), то общее расстояние от старта до цели может быть выражено через интервалы значений параметров пространства состояний (если допустить, что количество параметров составляет К ) выражением (28):
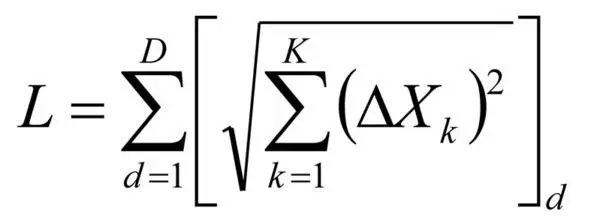
выражение 28
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная»
Представляем Вашему вниманию похожие книги на «Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





![Коллектив авторов Биографии и мемуары - Ковалиная книга. Вспоминая Юрия Коваля [второе издание, исправленное и дополненное]](/books/430445/kollektiv-avtorov-biografii-i-memuary-kovalinaya-kn-thumb.webp)

Обсуждение, отзывы о книге «Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.