Юрий Почанин - Робототехника в промышленности
Здесь есть возможность читать онлайн «Юрий Почанин - Робототехника в промышленности» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2022, Жанр: Прочая научная литература, Прочая научная литература, pedagogy_book, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Робототехника в промышленности
- Автор:
- Жанр:
- Год:2022
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Робототехника в промышленности: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Робототехника в промышленности»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Робототехника в промышленности — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Робототехника в промышленности», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
–погрешность отработки траектории рабочего органа —отклонение траектории рабочего органа от заданной управляющей программой;
–показатели надежности: установленная наработка на отказ, установленный срок службы до капитального ремонта и до списания;
–геометрические характеристики движений звеньев манипулятора представляют в виде линейных и угловых величин (вылет, ходы, углы поворота и пр.);
–быстродействие оценивают скоростями линейных и угловых перемещений звеньев манипулятора;
–геометрические характеристики рабочей зоны, рабочая зона представляет собой пространство, в котором может находиться рабочий орган при работе ПР;
–зона обслуживания (пространство, в котором рабочий орган выполняет свои функции в соответствии с назначением ПР);
–рабочее пространство (пространство, в котором могут находиться подвижные звенья манипулятора ПР);
–показатели устройств управления в паспорте промышленного робота обычно приводятся в краткой форме, а более полно даются в отдельном описании устройства управления;
–число одновременно управляемых движений по степеням подвижности;
–число каналов связи и для обмена сигналами с внешним оборудованием, оснасткой и аппаратурой;
–параметры энергопитания (для роботов с пневмоприводом – давление и расход воздуха, для роботов с электроприводом – напряжение и потребляемая мощность);
–технические характеристики датчиков информационного оснащения важны для решения вопросов, связанных с применением робота и организацией робототехнического комплекса (РТК);
–технические показатели рабочих органов роботов устанавливают отдельно для инструментов, технологических головок и для захватных устройств.
Поскольку промышленные роботы являются структурным элементом РТС или РТК, то и требования к ним определяются условиями функционирования в этих системах. С этой точки зрения все требования, предъявляемые к промышленным роботам, можно разделить на следующие группы:
–обеспечение функций и параметров гибкой производственной системы (ГПС);
–гибкость, сочетающая простоту и экономичность при переходе на другое изделие;
–простота и надежность работы, в том числе в интервале температур от О°С до 50°С;
–устойчивость работы в автоматических режимах;
–совместимость с сопрягаемым оборудованием (соответствие сложности ПР технологическому и вспомогательному оборудованию и оснастке (отсутствие избыточных универсальности и памяти), сопрягаемость ПР с оборудованием комплекса, возможность реализации управляющих воздействий на соответствующее оборудование, возможность автоматической перенастройки);
–экономичность работы при соответствующем числе степеней подвижности;
–точность (повторяемость) позиционирования с небольшим временем затухания колебаний в точке позиционирования;
–высокая удельная грузоподъемность;
–высокая помехозащищенность.
Глава 3. Конструкция промышленного робота
Промышленный технологический робот состоит из механической системы (манипуляционная система и исполнительные устройства), информационной системы и системы управления. Стандартная схема работы технологического промышленного робота представлена на рис. 3.1. Для осуществления технологического процесса вводится управляющая программа (УП) из системы программного управления (СПУ). Захват заготовки производится по команде. Для этого обеспечивается поступательное перемещение манипулятора и вращательное движение захватывающего устройства. Далее заготовка перемещается в рабочую зону, где подвергается обработке. При этом рабочий орган обладает возможностью возвратно-поступательного и вращательного движения. Через датчики обеспечивается обратная связь, учитывающая изменение внешних условий. Если происходит малейшее отклонение от заданной программы, то происходит корреляция движения. Если же наблюдается значительное отклонение и невозможность его исправления, то сигнал подается на главный компьютер. В результате робот может быть остановлен, чтобы его можно было отремонтировать.
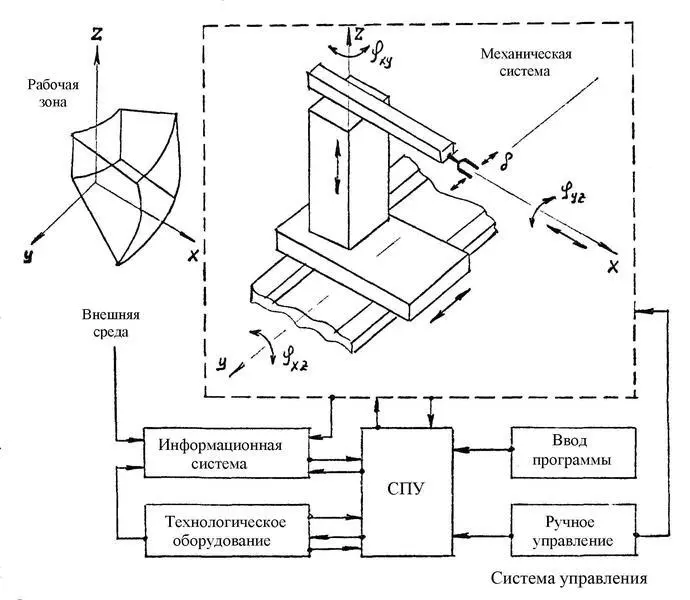
Рис.3.1. Стандартная схема работы технологического промышленного робота
Общая функциональная схема промышленного робота представлена на рис. 3.2.
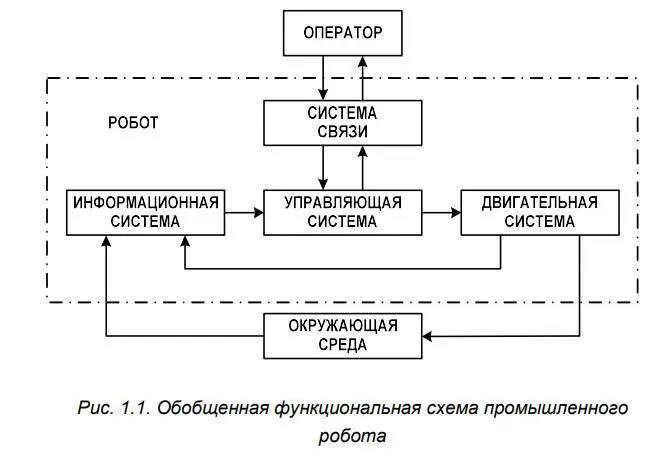
Рис.3.2. Общая функциональная схема промышленного робота
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Робототехника в промышленности»
Представляем Вашему вниманию похожие книги на «Робототехника в промышленности» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Робототехника в промышленности» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.