Юрий Почанин - Робототехника в промышленности
Здесь есть возможность читать онлайн «Юрий Почанин - Робототехника в промышленности» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2022, Жанр: Прочая научная литература, Прочая научная литература, pedagogy_book, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Робототехника в промышленности
- Автор:
- Жанр:
- Год:2022
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Робототехника в промышленности: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Робототехника в промышленности»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Робототехника в промышленности — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Робототехника в промышленности», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
5. Робот с полярной системой координатных перемещений и цилиндрической системой координат, схема его манипулятора представлена на рис. 1.5.
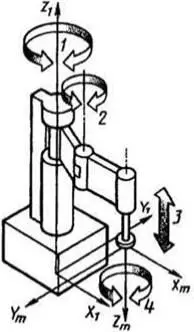
Рис.1.5. Схема робота с полярной или сложной цилиндрической системой координат
Степени подвижности данного манипулятора реализованы тремя вращательными одноподвижными кинематическими парами и одной поступательной одноподвижной кинематической парой. Манипулятор такого робота состоит из вращающейся колонны, или корпуса, присоединенного к нему и поворачивающегося в той же горизонтальной плоскости звена, на конце которого в направляющей перемещается вертикально «рука».
6. Кинематическая схема робота SCARA имеет две вращательные степени подвижности с параллельными осями, обеспечивающими плавные движения в выбранной плоскости, рис.1.6. Кинематика робота представлена на рис.1.7.
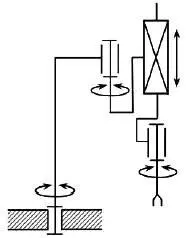
Рис.1.6. Кинематическая схема робота SCARA
Рис.1.7. Кинематика робота SCARA
Сочлененный манипулятор робота более широко используется для сборки во всем мире благодаря простоте и беспрепятственного монтажа. Роботы SCARA обычно имеют так называемую последовательную архитектуру, в которой один базовый двигатель должен нести все остальные установленные двигатели. Сам SCARA-робот, оригинальное исполнение. Один шаговый мотор приводит в движение внутренний рычаг, на котором установлен второй шаговик для привода наружного рычага. Промышленные SCARA-роботы используют именно этот вариант. Одним из недостатков этих типов роботов является то, что они чрезвычайно дороги по сравнению с довольно недорогими декартовыми роботами. Кроме того, для работы им требуется сложное программное обеспечение высокого уровня.
7. Параллельные роботы. Роботы с параллельной кинематикой – роботы, звенья которых образуют замкнутые кинематические цепи с вращательными и поступательными шарнирами, имеющими параллельные оси. Структурная схема параллельного робота показана на рис.1.8.

Рис.1.8. Структурная схема параллельного робота
Параллельный робот специально разработан, чтобы оставаться жестким и противостоять всем нежелательным помехам и движениям, в отличие от серийных роботов-манипуляторов. Хотя каждый привод работает с определенной степенью свободы, их гибкость в конечном итоге ограничивается другими приводами. Его жесткость и прочность отделяют параллельные манипуляторы от серийных цепных роботов.
8. Роботы с комбинированной кинематикой-роботы, кинематика которых представляет собой комбинацию указанных выше схем.
Выбор системы координат определяет тип руки манипулятора и вид его зоны обслуживания.
1.2. Классификация роботов по типу управления
По методу управления, или степени непосредственного участия человека в управлении, роботы подразделяются на три класса:
1) биотехнические,
2) интерактивные и
3) автоматические.
Биотехнические роботы функционируют только с непосредственным участием человека-оператора, который фактически берет на себя управление исполнительными механизмами.
В зависимости от способа реализации биотехнического управления можно выделить:
–дистанционно управляемые копирующие роботы – управление с помощью задающего механизма,
–командные – управляются с кнопочного или клавишного пульта;
–экзо скелетоны (киборги) – управляются биоимпульсами;
–полуавтоматические роботы – управляемые с помощью ЭВМ.
Биотехническое управление может использоваться также в интерактивных и автоматических системах эпизодически в режиме обучения робота или в аварийных ситуациях, при выполнении отдельных ответственных операций, которые по каким-либо причинам невозможно произвести автоматически.
Если ручное управление выполняется непрерывно, то робот теряет один из главных признаков – автоматичность и, по существу, вырождается в ту или иную машину – манипулятор, автокар, грузоподъемный кран и т.п.
Копирующие роботы имеют задающий (управляющий) орган, кинематически связанный в определенном масштабе с исполнительным. Перемещение человеком-оператором задающего органа полностью копируется исполнительным органом робота с учетом геометрического и силового масштабов.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Робототехника в промышленности»
Представляем Вашему вниманию похожие книги на «Робототехника в промышленности» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Робототехника в промышленности» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.