Юрий Почанин - Робототехника в промышленности
Здесь есть возможность читать онлайн «Юрий Почанин - Робототехника в промышленности» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2022, Жанр: Прочая научная литература, Прочая научная литература, pedagogy_book, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Робототехника в промышленности
- Автор:
- Жанр:
- Год:2022
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Робототехника в промышленности: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Робототехника в промышленности»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Робототехника в промышленности — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Робототехника в промышленности», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
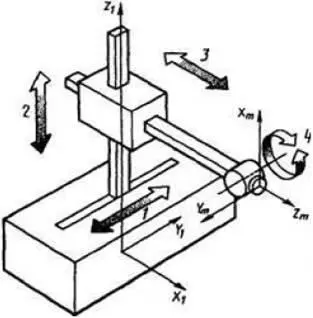
Рис.1.1. Схема робота с прямоугольной системой координат
Простота и свойства системы линейных координатных перемещений манипуляторов с прямоугольной системой координат (удобство обслуживания рабочей зоны, относительно высокая жесткость) обеспечили использование таких ПР в стесненных условиях, в подвесном исполнении и при необходимости обеспечения высокой точности. Примерами могут служить обслуживание основного технологического оборудования (металлорежущие станки) и сборочных операций. Несмотря на все их преимущества (сравнительная простота манипулятора и его программирования), эти промышленные роботы используются сравнительно редко. Их недостатки это – увеличение габаритов при относительно малом объеме рабочей зоны, увеличение длительности циклограммы процесса. Как правило, для выполнения подобных работ используют каретки, подвешиваемые на направляющих, либо используют портальные конструкции.
2.Робот с цилиндрической системой координат имеет одну вращательную и две поступательные подвижные кинематические пары для реализации необходимых степеней подвижности, как показано на рис.1.2. Они образуют полярную систему координатных перемещений. В отличие от предыдущей схемы манипулятора с линейно системой координатных перемещений, у рассматриваемого колонна не перемещается относительно корпуса горизонтально, а совершает поворот вокруг своей оси. Остальные степени подвижности реализуются, как и в предыдущем случае. Форма рабочей зоны такого манипулятора ПР представляет собой полый цилиндр.
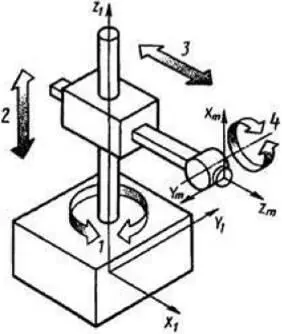
Рис. 1.2. Схема робота с цилиндрической системой координат
Удобство конструкции и программирования способствовало более широкому распространению таких манипуляторов с полярной системой координатных перемещений. Эта система позволяет обслуживать рабочее пространство с большим объемом и облегчает планировку и компоновку рабочих мест и оборудования при создании робототехнических комплексов. Однако у этой системы координатных перемещений есть и недостаток. Им является затруднение обслуживания технологического оборудования, расположенного на небольшой высоте.
3. Робот со сферической системой координат, схема которого представлена на рис. 1.3, имеет две вращательные подвижные кинематические пары и одну поступательную. В отличие от предыдущей схемы, в рассматриваемой еще одна поступательная кинематическая пара заменена на вращательную, однако «рука» манипулятора всё ещё способна совершать поступательные перемещения. Форма рабочей зоны такого манипулятора представляет собой полый шар, ограниченный сферической и двумя плоскими поверхностями. Такие манипуляторы более громоздки по сравнению с предыдущими и нуждаются в более сложной системе программного управления.
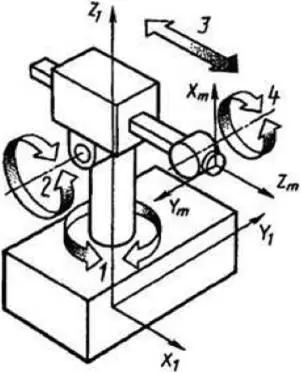
Рис. 1.3. Схема робота со сферической системой координат
Тем не менее, их высокая универсальность, наряду с возможностью обслуживания рабочих зон большего объема (в сравнении с манипуляторами прямоугольной и цилиндрической систем координат), определили их более широкое распространение.
4.Робот с ангулярной (угловой) системой координатных перемещений и сферической системой координат, схема которого представлена па рис. 1.4, имеет три вращательные подвижные кинематические пары, обеспечивающие степени подвижности.
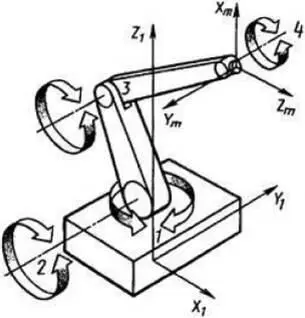
Рис. 1.4. Схема робота с ангулярной (угловой) системой координатных перемещений
Такую конфигурацию ещё называют антропоморфной. Положение и ориентация манипулятора в рабочей зоне такого робота определяются за счет изменения только угловых положений его звеньев друг относительно друга. Иными словами, манипулятор состоит из звеньев аналогично руке человека. Форма же рабочей зоны представляет собой сложное сферическое пространство, ограниченное сферическими и цилиндрическими поверхностями.
Ангулярная система координатных перемещений является достаточно сложной как с конструкторской точки зрения, поскольку необходимы специальные меры для повышения точности и жесткости манипулятора, так и с точки зрения программирования. В результате, помимо сказанного, требуется использование более сложных устройств программного управления. В то же время, эти манипуляторы отличает высокая универсальность и наибольший объём обслуживаемой рабочей зоны. Благодаря этому они хорошо компонуются с оборудованием, позволяя минимизировать производственные площади.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Робототехника в промышленности»
Представляем Вашему вниманию похожие книги на «Робототехника в промышленности» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Робототехника в промышленности» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.