Юрий Почанин - Робототехника в промышленности
Здесь есть возможность читать онлайн «Юрий Почанин - Робототехника в промышленности» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2022, Жанр: Прочая научная литература, Прочая научная литература, pedagogy_book, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Робототехника в промышленности
- Автор:
- Жанр:
- Год:2022
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Робототехника в промышленности: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Робототехника в промышленности»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Робототехника в промышленности — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Робототехника в промышленности», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Опорные конструкции ПР выполняются в виде оснований, корпусов, стоек, рам тележек, порталов и т.п. Они служат для размещения всех устройств и агрегатов IIP, а также для обеспечения необходимой прочности и жесткости манипулятора.
Манипуляционная система (манипулятор) робота представляет собой многозвенный пространственный механизм с разомкнутой кинематической цепью, первое звено которого (стойка) является основанием робота, а последнее несет рабочий орган, непосредственно взаимодействующий с объектом манипулирования. Система звеньев МС структурно связана в кинематическую цепь с помощью вращательных или поступательных пар.
Под звеном механизма понимают деталь (либо совокупность деталей с общим законом движения), которая в процессе движения и взаимодействия с другими звеньями остается жесткой, не изменяя своих размеров и формы. Неподвижное звено механизма называется стойкой, или основанием. Соединение двух соприкасающихся звеньев, допускающее их определенное относительное движение, именуют кинематической парой, или, сокращенно, парой. Если одно из крайних звеньев многозвенного механизма закреплено к основанию, а другое свободно, то такой механизм относят к группе механизмов с открытой, или разомкнутой, кинематической цепью.
Свободное абсолютно твердое тело (или звено), не связанное с другими телами, может совершать три независимых поступательных движения в направлении осей X, У, Z и три вращательных относительно них. Минимальное количество обобщенных координат, полностью определяющее положение и возможные направления движения тела, называют числом его степеней свободы, или степеней подвижности. Промышленный робот, который имеют 6 степеней свободы, а это значит, что он способен двигаться по 6 различным направлениям, представлен рис.3.3.
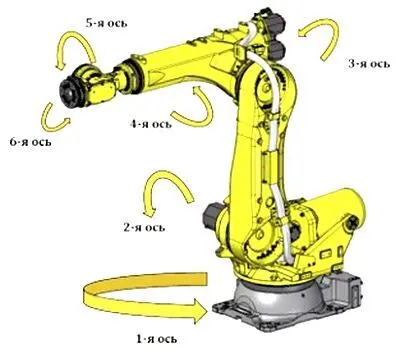
Рис. 3.3. Промышленный робот с 6 степенями свободы
В конструкциях манипуляторов преимущественно распространены кинематические пары пятого класса, значительно реже используются пары четвертого и, тем более, третьего классов. Это объясняется тем, что пары высоких классов более сложны и менее технологичны по сравнению с парами низких классов, а кроме того, сложны в управлении. В связи с этим во многих случаях целесообразно вместо одной пары высокого применять несколько пар низкого класса.
Рабочий орган манипулятора ПР, необходимый для непосредственного воздействия на объект манипулирования при выполнении технологических операций или вспомогательных переходов, представляет собой захватное устройство или рабочий инструмент.
Устройство передвижения служит для перемещения манипулятора или ПР в целом в необходимое место рабочего пространства и состоит из ходовой части и приводных устройств.
Подобно человеческой руке манипулятор также перемещает концевой эффектор с одного места на другое. При оснащении концевого эффектора различными устройствами, у робота появляется возможность выполнять определенные технологические операции. В робототехнике концевой эффектор – устройство на конце руки робота, предназначенное для взаимодействия с окружающей средой. Одним из наиболее распространенных вариантов является подобие руки, которая позволяет роботу брать и перемещать объекты с места на место
Функциональная схема механической системы промышленного робота представлена на рис.3.4.
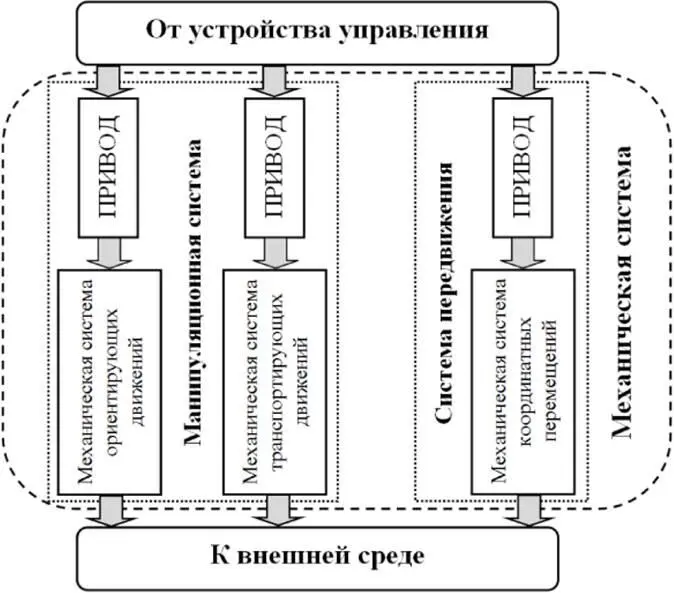
Рис. 3.4. Функциональная схема механической системы промышленного робота
Рассмотрев определение числа степеней подвижности, можно перейти к рассмотрению маневренности манипулятора ПР. Под маневренностью принято понимать число его степеней подвижности при неподвижном (зафиксированном в пространстве) положении его выходного звена (рабочего органа). Маневренность определяет возможность руки манипулятора выполнять сложные движения и обходить препятствия в рабочем пространстве при манипулировании с объектом или выполнении сложных операций.
Все манипуляционные устройства характеризуются маневренностью и коэффициентом сервиза (КС), под которым понимают возможность подхода РО к заданной точке с разных направлений. КС дает представление о двигательных возможностях М. Маневренность М – ϶ᴛᴏ число степеней подвижности при фиксированном положении РО, которая определяет возможность обхода манипулятором препятствий в рабочем объеме и способность к выполнению сложных операций.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Робототехника в промышленности»
Представляем Вашему вниманию похожие книги на «Робототехника в промышленности» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Робототехника в промышленности» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.