Юрий Почанин - Робототехника в промышленности
Здесь есть возможность читать онлайн «Юрий Почанин - Робототехника в промышленности» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2022, Жанр: Прочая научная литература, Прочая научная литература, pedagogy_book, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Робототехника в промышленности
- Автор:
- Жанр:
- Год:2022
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Робототехника в промышленности: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Робототехника в промышленности»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Робототехника в промышленности — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Робототехника в промышленности», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Применение пневматических приводов в робототехнике объясняется их дешевизной, простотой и соответственно надежностью. Пневматические приводы применяют только в роботах небольшой грузоподъемности – до 10кг, реже 20кг.
Принцип его действия очень прост. Компрессор является своеобразной «газовой пружиной». Он сжимает воздух и хранит накопленную потенциальную энергию до момента подачи его в пневматический двигатель. В качестве двигателей в пневматических приводах используются:
–силовые пневмоцилиндры с возвратно-поступательным движением штока;
–поворотные пневмомоторы;
–ротационные пневмомоторы.
Наиболее распространены пневмоцилиндры, которые могут соединяться со звеньями манипулятора без помощи передаточных механизмов, что упрощает механическую систему робота. При расширении сжатого воздуха эта потенциальная энергия перейдет в кинетическую энергию поршня со штоком, рис.3.5, который является простейшим пневмодвигателем.
Данный пневмоцилиндр позволяют обеспечить только две точки позиционирования, соответствующие втянутому и выдвинутому положению штока. Соответственные позиции занимают и связанные со штоком объекты. Для увеличения точек позиционирования применяют многопозиционные пневмоцилиндры.
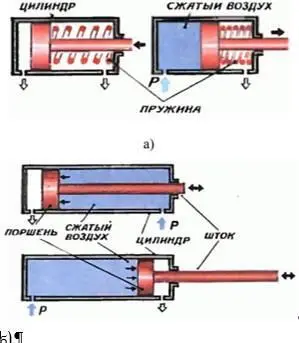
Рис. 3.5. Принцип действия пневмоцилиндра:
а-одностороннего действия, б-двустороннего действия
Все достоинства и недостатки пневмопривода связаны со свойствами главного рабочего тела – сжатого воздуха. Его высокая экологичность обусловливает широкое применение именно пневмоприводов в пищевой, электронной, фармацевтической промышленности и в точном приборостроении.
К недостаткам следует отнести:
–трудность реализации следящего привода;
–невозможность точного позиционирования из-за высокой сжимаемости энергоносителя;
–значительные размеры исполнительных двигателей из-за ограниченного давления энергоносителя (не более 0,6 МПа);
–необходимость в специальных тормозных устройствах для остановки исполнительных органов в заданных точках с доступными ускорениями;
–пониженный КПД (0,15-0,20).
Гидравлические приводы являются более сложными и дорогими по сравнению с пневматическими и электрическими. Однако простота реализации бесступенчатого регулирования скоростей, малая инерционность и компактность, возможность организации следящих систем с высоким быстродействием, а также наилучшее соотношение массогабаритных характеристик и удельной стоимости в диапазоне от 500 до 1 000 Вт и выше определяют их использование в качестве основного типа привода для тяжелых и сверхтяжелых роботов, рис.3.6.

Рис. 3.6. Гидравлический привод
Хорошая управляемость гидравлических приводов при наличии высококачественных динамических характеристик способствует их применению и в роботах средней грузоподъемности.
Объемным гидравлическим приводом называется совокупность устройств и гидролиний, предназначенных для передачи энергии и приведения в движение механизмов и рабочих органов машин посредством жидкости под давлением.
В гидроцилиндрах одностороннего действия шток выдвигается из исходного положения за счёт создания давления рабочей жидкости в цилиндре, а возврат – за счёт пружины. В гидроцилиндрах двухстороннего действия усилие на штоке создается за счет давления рабочей жидкости и при прямом, и при обратном ходе штока.
В качестве рабочих жидкостей применяются минеральные, синтетические и полусинтетические масла, жидкости на силиконовой основе, водомасляные и масляно-водные эмульсии. Гидропривод обеспечивает большой диапазон рабочих нагрузок робота (1…10000) Н, высокую точность позиционирования (0,01…2) мм, широкий диапазон скоростей рабочих органов (15… 2000) мм/с или (3…180) град/с. Рабочее давление жидкости лежит в пределах (14…21) Мпа.
Элементы гидропривода, аналогичны элементам пневмопривода: двигатель поступательного движения (гидроцилиндр) или углового перемещения (поворотный гидродвигатель). Различие состоит в использовании вместо сжатого воздуха гидрожидкости, (как правило, масла) подаваемого под давлением до 20 МПа. Это обеспечивает создание усилий на два порядка большее. Лучшие динамические показатели и показатели точности гидропривода обусловлены не сжимаемостью жидкости.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Робототехника в промышленности»
Представляем Вашему вниманию похожие книги на «Робототехника в промышленности» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Робототехника в промышленности» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.