Рафаэль Лаос-Бельтра - Том 28. Математика жизни. Численные модели в биологии и экологии.
Здесь есть возможность читать онлайн «Рафаэль Лаос-Бельтра - Том 28. Математика жизни. Численные модели в биологии и экологии.» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2014, ISBN: 2014, Издательство: «Де Агостини», Жанр: Математика, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Том 28. Математика жизни. Численные модели в биологии и экологии.
- Автор:
- Издательство:«Де Агостини»
- Жанр:
- Год:2014
- Город:Москва
- ISBN:978-5-9774-0723-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Том 28. Математика жизни. Численные модели в биологии и экологии.: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Том 28. Математика жизни. Численные модели в биологии и экологии.»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Том 28. Математика жизни. Численные модели в биологии и экологии. — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Том 28. Математика жизни. Численные модели в биологии и экологии.», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
В математике модуль вектора обозначается | u |. К примеру, модули двух описанных выше векторов равны:

* * *
ВЕКТОРНОЕ ПРОСТРАНСТВО
В результате изучения матриц и систем линейных уравнений в XVII веке было определено понятие векторного пространства. Не будем останавливаться на нем подробнее, отметим лишь, что с точки зрения математики возможность сложения векторов (то есть выполнения операции u ->+ v ->) и умножения произвольного числа kна вектор u ->( k· u ->) вкупе с соблюдением некоторых свойств позволяет определить векторное пространство как множество векторов, обладающее определенными характеристиками. Векторное пространство является одним из основных понятий в математической биологии. Оно используется в изучении филогенеза, при классификации цепочек ДНК, в экологических моделях, при исследовании метаболизма или восприятия цветов, а также в других областях.
* * *
Если возникает необходимость определить вектор-строку, достаточно применить операцию транспонирования:
( u 1u 2 … u m ).
Далее вы узнаете, как векторы используются в изучении локомоции (перемещения животных) и при анализе нейронных сетей.
Один из самых интересных способов применения векторов — изучение локомоции животных. Кузнечики прыгают, люди могут поднимать тяжести руками, рыбы плавают, птицы летают. Понять механику этих движений помогают операции с векторами.
Если мы рассмотрим движение руки человека, один вектор можно будет сопоставить бицепсу (этот вектор будет обозначать силу сокращения мышц), второй вектор будет обозначать противодействующую силу, третий вектор — указывать вес объекта, который поднимает рука.
Сложение векторов также помогает понять функцию некоторых мускулов. Один из методов сложения векторов — это известное правило параллелограмма. Заключается оно в том, что нужно привести два вектора, сумму которых мы хотим найти, к общему началу. Затем на этих двух векторах нужно построить параллелограмм.
К примеру, если рассмотреть ногу человека и обозначить боковую часть четырехглавой мышцы бедра вектором F L -> , а среднюю часть этой мышцы — вектором F M -> , сумму этих векторов можно найти по правилу параллелограмма. Иными словами, сумма векторов F L -> + F M -> будет обозначать суммарную силу четырехглавой мышцы F -> .
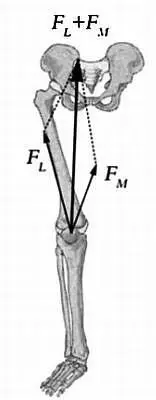
Сумма векторов, соответствующих мышцам ноги, найденная по правилу параллелограмма.
Другой классический пример — сила F -> , с которой сокращаются мышцы-сгибатели предплечья. Если представить эту силу в виде вектора, то она будет равна сумме двух других векторов, соответствующих другим мышцам. Один из этих векторов, F U -> , перпендикулярен предплечью, второй вектор, F И -> , параллелен предплечью.
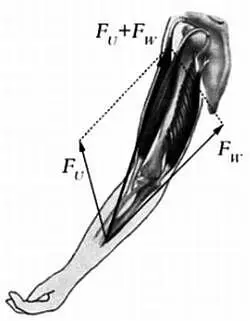
Сумма векторов, соответствующих мышцам руки, найденная по правилу параллелограмма.
Если векторов больше двух, их сумму можно найти по правилу многоугольника. Заключается оно в том, что конец каждого вектора совмещается с началом следующего. Суммой исходных векторов будет вектор, начало которого совпадает с началом первого вектора, конец — с концом последнего вектора. Этот метод полезен при вычислении скорости движения корабля, полета птиц, перемещения пловца или рыбы.
В примерах с птицей или рыбой результирующая скорость будет равна сумме всего двух векторов. Но в силу особенностей задачи для сложения векторов используется не правило параллелограмма, а правило многоугольника.
Допустим, что рыба или птица движется в воде или в воздухе со скоростью, обозначаемой вектором V A ->, V M -> — скорость течения воды (или ветра). Как следствие, вектор результирующей скорости V -> будет равен сумме векторов V A -> и V M -> , определяемой по правилу многоугольника.
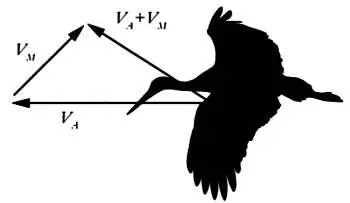
Сумма векторов в примере с полетом птицы, найденная по правилу многоугольника.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Том 28. Математика жизни. Численные модели в биологии и экологии.»
Представляем Вашему вниманию похожие книги на «Том 28. Математика жизни. Численные модели в биологии и экологии.» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Том 28. Математика жизни. Численные модели в биологии и экологии.» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.