Вячеслав Филин - Воспоминания о Лунном корабле
Здесь есть возможность читать онлайн «Вячеслав Филин - Воспоминания о Лунном корабле» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: М., Год выпуска: 1992, ISBN: 1992, Издательство: Культура, Жанр: История, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Воспоминания о Лунном корабле
- Автор:
- Издательство:Культура
- Жанр:
- Год:1992
- Город:М.
- ISBN:5-7158-0050-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Воспоминания о Лунном корабле: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Воспоминания о Лунном корабле»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание снабжено уникальными фоторгафиями и рисунками.
Воспоминания о Лунном корабле — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Воспоминания о Лунном корабле», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
На фото 12 и 15 представлен во всей красе советский Лунный корабль. Его высота и максимальный размер между опорами посадочного устройства составили более 5 м (примерно 5200 мм), а начальная масса в конце разработки выросла до 5,5 тонн. На фото видны опорные ноги, уложенные в транспортное положение; остронаправленные антенны; навесное оборудование.

Рис. 12. ЛК в сборочном цехе (без теплоизоляции)
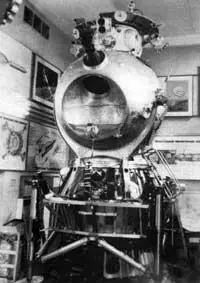
Рис. 15. Советский Лунный корабль
Перед полетом весь ЛК закрывался экранно-вакуумной теплоизоляцией, которая сглаживала его контуры и при этом обеспечивала надежную тепловую защиту всех систем корабля.
В этом разделе мы не рассказываем о принципах построения систем Лунного корабля. Таких систем на Лунном корабле было много:
система автономного управления;
система мягкой посадки;
система прилунения;
система обеспечения стыковки;
система электропитания;
система управления бортовым комплексом;
бортовая кабельная сеть;
бортовая цифровая вычислительная машина;
антенно-фидерные устройства;
система дальней радиосвязи;
система телевидения;
система измерений;
скафандр экипажа;
система обеспечения газового состава;
система терморегулирования;
система исполнительных органов;
научное оборудование;
средства обеспечения старта;
средства безопасности.
Автор этой книги не ставил задачу подробно описать принципы построения каждой системы, ее структуру и функционирование. Однако нельзя не сказать хотя бы несколько слов о системе управления.
Система управления — это мозг ракеты, космического объекта. Без системы управления немыслим аппарат. Можно ли представить себе автомобиль без рулевого управления или корабль без штурвала и рулевого? Нетрудно представить все последствия этого. Так и система управления Лунного корабля взяла на себя все функции по обеспечению заданного движения: посадка и прилунение, взлет и стыковка на орбите Луны с лунным орбитальным кораблем и т. д.
Разработку системы управления ЛК вел научно-исследовательский институт, руководимый академиком Н.А.Пилюгиным. Этот коллектив обладал большим опытом в разработке систем управления ракет, имел достаточный задел новых идей по системам управления космических объектов, которые и воплотил в систему управления ЛК. Институт был ведущим в создании системы, а за ним стояли еще десятки организаций, разрабатывающих отдельные элементы и блоки этой сложной системы.
Система автономного управления ЛК обеспечивает автоматическое управление его движением с возможностью ручного ввода установок для коррекции траектории на всех участках полета ЛК и управление горизонтальным маневром ЛК на заключительном участке посадки на поверхность Луны. Такая короткая, на первый взгляд, формулировка задач системы управления на самом деле предполагает огромную работу по аппаратурному и программно-математическому обеспечению.
Надо сказать, что впервые в отечественной космонавтике система управления космического объекта строилась на базе бортовой цифровой вычислительной машины (БЦВМ), в которой информация со всех чувствительных датчиков обрабатывалась по заданной логике, делалась оценка работоспособности всех систем и агрегатов ЛК и вырабатывались необходимые команды для их дальнейшего функционирования и полета.
В качестве чувствительных датчиков системы управления использовались гироскопические приборы (объединены в виде трехосной гиростабилизированной платформы) для пространственной ориентации, посадочный радиолокатор для измерения скорости и высоты полета ЛК, коллиматорное прицельное устройство и радиотехнические средства измерения. Для обеспечения высоких требований по надежности БЦВМ имела три независимых, параллельно работающих канала.
В систему управления входили полуавтоматическая система управления (ПСУ) горизонтальным маневром и угловой скоростью ЛК в процессе стыковки и ручная система управления (РСУ). РСУ позволяла пилоту самостоятельно выбирать место посадки на Луне. Для этого в его распоряжении было коллиматорное прицельное устройство и двухканатная ручка управления ориентацией и пропорциональным изменением горизонтальной скорости ЛК.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Воспоминания о Лунном корабле»
Представляем Вашему вниманию похожие книги на «Воспоминания о Лунном корабле» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.






Обсуждение, отзывы о книге «Воспоминания о Лунном корабле» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.