Ричард Фейнман - 8. Квантовая механика I
Здесь есть возможность читать онлайн «Ричард Фейнман - 8. Квантовая механика I» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Физика, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:8. Квантовая механика I
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
8. Квантовая механика I: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «8. Квантовая механика I»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
8. Квантовая механика I — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «8. Квантовая механика I», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Эти уравнения можно, конечно, разрешить относительно С + и С - ; это даст нам преобразование при повороте вокруг оси у на -90°. Переставив еще и штрихи, мы напишем

§ 5. Повороты вокруг оси х
Вы, пожалуй, подумаете: «Это становится смешным. Чему же нас теперь будут учить— поворотам на 47° вокруг оси у, потом на 33° вокруг x? Долго ли это будет продолжаться?» Нет, оказывается, я почти все рассказал. Зная только два преобразования — на 90° вокруг оси у и на произвольный угол вокруг оси z (как вы помните, именно с этого мы начали),— мы уже способны производить любые повороты.
Для иллюстрации предположим, что нас интересует поворот на угол а вокруг оси х. Мы знаем, как быть с поворотом на угол а вокруг оси z, но нам нужен поворот вокруг оси х. Как его определить? Сперва повернем ось z вниз до оси х, а это есть поворот на +90° вокруг оси у (фиг. 4.8).
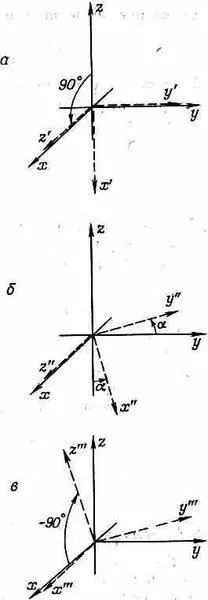
Фиг. 4.8. Поворот на угол a вокруг оси х равнозначен повороту на +90° вокруг оси у (а), за которым следует поворот ни а вокруг оси z' (б), вслед за которым происходит поворот на -90° вокруг оси. у" (в).
Затем вокруг оси z' повернемся на угол a. А потом повернемся на -90° вокpуг оси у".
Итог этих трех поворотов тот же самый, что при повороте вокруг оси х на угол a . Таково свойство пространства. (Все эти сочетания поворотов их результат очень трудно себе представить. Не правда ли, странно, что, живя в трех измерениях, мы все же с трудом воспринимаем, что произойдет, если сперва повернуться так, а потом еще как-нибудь. Вероятно, если бы мы были птицами или рыбами и если а мы на собственном опыте знали, что бывает, когда все время крутишь разные сальто в пространстве, нам было бы легче воспринимать подобные вещи.) Во всяком случае, давайте выведем преобразование для поворота на угол а вокруг оси х, пользуясь тем, что нам уже известно. При первом повороте на +90 ° вокруг оси у амплитуды следуют закону (4.32). Если повернутые оси обозначить х' , y' и z', то последующий поворот на угол а вокруг оси z переводит нас в систему отсчета х". у", z", для которой

Последний поворот на -90° вокруг оси у" переводит нас в систему х'", у'", z'"; из(4.33) следует

Сочетая эти два последних преобразования, получаем
Подставляя сюда вместо С' + и С' -(4.32), придем к полному преобразованию

А если вспомнить, что

то эти формулы можно записать проще:

Это и есть наше искомое преобразование для поворота вокруг оси х на любой угол a. Оно лишь чуть посложнее остальных,
§ 6. Произвольные повороты
Теперь уже понятно, как быть с произвольным поворотом. Во-первых, заметьте, что любая относительная ориентация двух систем координат может быть описана тремя углами (фиг. 4.9).

Фиг. 4.9. Ориентацию любой системы координат х' , у', г' по отношению к другой системе х, у, z можно определить с помощью углов Эйлера a , b, g .
Если есть система осей х', у', z', ориентированных относительно х, у, z как угодно, то соотношение между ними можно описать тремя углами Эйлера a, b и g, определяющими три последовательных поворота, которые переводят систему х, у, z в систему х', у', z' . Отправляясь от x, у, z, мы поворачиваем нашу систему на угол bets вокруг оси z, перенося ось х на линию х'. Затем мы проводим поворот на угол а вокруг этой временной оси х 1 , чтобы довести ось z до z'. Наконец, поворот вокруг новой оси z (т. е. вокруг z' ) на угол g переведет ось х 1в х', а ось у в у'. Мы знаем преобразования для каждого из трех поворотов — они даются формулами (4.19) и (4.34). Комбинируя их в нужном порядке, получаем
Читать дальшеИнтервал:
Закладка:
Похожие книги на «8. Квантовая механика I»
Представляем Вашему вниманию похожие книги на «8. Квантовая механика I» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


![Ричард Фейнман - Фейнмановские лекции по физике. Современная наука о природе [litres]](/books/398001/richard-fejnman-fejnmanovskie-lekcii-po-fizike-sov-thumb.webp)
![Пол Халперн - Квантовый лабиринт. Как Ричард Фейнман и Джон Уилер изменили время и реальность [litres]](/books/414310/pol-halpern-kvantovyj-labirint-kak-richard-fejnman-thumb.webp)


Обсуждение, отзывы о книге «8. Квантовая механика I» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.