Владимир Дьяконов - Maple 9.5/10 в математике, физике и образовании
Здесь есть возможность читать онлайн «Владимир Дьяконов - Maple 9.5/10 в математике, физике и образовании» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2006, ISBN: 2006, Издательство: СОЛОН-Пресс, Жанр: Программы, Математика, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Maple 9.5/10 в математике, физике и образовании
- Автор:
- Издательство:СОЛОН-Пресс
- Жанр:
- Год:2006
- Город:Москва
- ISBN:5-98003-258-4
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Maple 9.5/10 в математике, физике и образовании: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Maple 9.5/10 в математике, физике и образовании»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Maple 9.5/10 в математике, физике и образовании — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Maple 9.5/10 в математике, физике и образовании», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Отвлекшись от физики, приведем несколько примеров на составление и решение дифференциальных уравнений первого порядка в аналитическом виде (файл dea):
> dsolve(diff(y(х),х)-а*х=0, y(х));
> dsolve(diff(y(х),х)-y(х)=ехр(-х), y(х));
> dsolve(diff(y(х),х)-y(х)=sin(х)*х, y(х));

> infolevel[dsolve] := 3:
> dsolve(diff(y(x),x)-y(x)=sin(x)*x, y(x));
Methods for first order ODEs:
Trying classification methods —
trying a quadrature
trying 1st order linear
<- 1st order linear successful
Обратив внимание на вывод в последнем примере. Он дан при уровне вывода n=3
Следующие примеры иллюстрируют возможность решения одного и того же дифференциального уравнения ode_L разными методами:
> restart: ode_L := sin(x)*diff(y(x),x)-cos(x)*y(x)=0;

> dsolve(ode_L, [linear], useInt);
> value(%);
> dsolve(od_L, [separable], useInt);

> value(%);
> mu := intfactor(ode_L);

> dsolve(mu*ode_L, [exact], useInt);
Разумеется, приведенными примерами далеко не исчерпываются возможности аналитического решения дифференциальных уравнений.
7.2.2. Полет тела, брошенного вверх
Из приведенных выше примеров видно, что для задания производной используется ранее рассмотренная функция diff. С помощью символа $ в ней можно задать производную более высокого порядка.
В соответствии со вторым законом Ньютона многие физические явления, связанные с движением объектов, описываются дифференциальными уравнениями второго порядка. Ниже дан пример задания и решения такого уравнения (файл
dem), описывающего движение тела, брошенного вверх на высоте h 0со скоростью v 0при ускорении свободного падения g:
> restart; eq2:=diff(h(t),t$2) = -g;
> dsolve({eq2,h(0)=h[0], D(h)(0)=v[0]},h(t));assign(s2);
Итак, получено общее уравнение для временной зависимости высоты тела h(t). Разумеется, ее можно конкретизировать, например, для случая, когда g=9,8, h 0=10 и v 0=100:
> g:=9.8:
> s2:=dsolve({eq2,h(0)=10,D(h)(0)=100},h(t));assign(s2);

> plot(h(t),t=0..20,color=black);
Зависимость высоты тела от времени h(t) представлена на рис. 7.5. Нетрудно заметить, что высота полета тела вначале растет и достигнув максимума начинает снижаться. Оговоримся, что сопротивление воздуха в данном примере не учитывается, что позволяет считать задачу линейной. Полученное с помощью Maple 9.5 для этого случая решение совпадает с полученным вручную в примере, описанном в разделе 7.1.3.
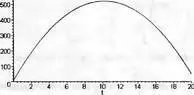
Рис. 7.5. Зависимость высоты полета тела от времени h(t)
7.2.3. Поведение идеального гармонического осциллятора
Еще одним классическим применением дифференциальных уравнений второго порядка является решение уравнение идеального гармонического осциллятора (файл deio):
> restart:eq3:=diff(y(t),t$2)=-omega^2*y(t);
> dsolve(eq3,y(t));
> s:=dsolve({eq3,y(0)=-1,D(y)(0)=1}, y(t));

> assign(s);omega:=2;
> plot(y(t),t=0..20,color=black);
Интервал:
Закладка:
Похожие книги на «Maple 9.5/10 в математике, физике и образовании»
Представляем Вашему вниманию похожие книги на «Maple 9.5/10 в математике, физике и образовании» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Maple 9.5/10 в математике, физике и образовании» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.