Ibrahim Dogan - Advanced PIC Microcontroller Projects in C
Здесь есть возможность читать онлайн «Ibrahim Dogan - Advanced PIC Microcontroller Projects in C» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Burlington, Год выпуска: 2008, ISBN: 2008, Издательство: Elsevier Ltd, Жанр: Программирование, Компьютерное железо, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Advanced PIC Microcontroller Projects in C
- Автор:
- Издательство:Elsevier Ltd
- Жанр:
- Год:2008
- Город:Burlington
- ISBN:978-0-7506-8611-2
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Advanced PIC Microcontroller Projects in C: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Advanced PIC Microcontroller Projects in C»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
• Features 20 complete, tried and test projects
• Includes a CD-ROM of all the programs, hex listings, diagrams, and data sheets
Advanced PIC Microcontroller Projects in C — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Advanced PIC Microcontroller Projects in C», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
1.3.13 Real-time Clock
A real-time clock enables a microcontroller to receive absolute date and time information continuously. Built-in real-time clocks are not common in most microcontrollers, since the same function can easily be implemented by either a dedicated real-time clock chip or a program written for this purpose.
1.3.14 Sleep Mode
Some microcontrollers (e.g., PICs) offer built-in sleep modes, where executing this instruction stops the internal oscillator and reduces power consumption to an extremely low level. The sleep mode’s main purpose is to conserve battery power when the microcontroller is not doing anything useful. The microcontroller is usually woken up from sleep mode by an external reset or a watchdog time-out.
1.3.15 Power-on Reset
Some microcontrollers (e.g., PICs) have built-in power-on reset circuits which keep the microcontroller in the reset state until all the internal circuitry has been initialized. This feature is very useful, as it starts the microcontroller from a known state on power-up. An external reset can also be provided, where the microcontroller is reset when an external button is pressed.
1.3.16 Low-Power Operation
Low-power operation is especially important in portable applications where microcontroller-based equipment is operated from batteries. Some microcontrollers (e.g., PICs) can operate with less than 2mA with a 5V supply, and around 15mA at a 3V supply. Other microcontrollers, especially microprocessor-based systems with several chips, may consume several hundred milliamperes or even more.
1.3.17 Current Sink/Source Capability
Current sink/source capability is important if the microcontroller is to be connected to an external device that might draw a large amount of current to operate. PIC microcontrollers can source and sink 25mA of current from each output port pin. This current is usually sufficient to drive LEDs, small lamps, buzzers, small relays, etc. The current capability can be increased by connecting external transistor switching circuits or relays to the output port pins.
1.3.18 USB Interface
USB is currently a very popular computer interface specification used to connect various peripheral devices to computers and microcontrollers. Some PIC microcontrollers provide built-in USB modules. The PIC18F2x50, for example, has built-in USB interface capabilities.
1.3.19 Motor Control Interface
Some PIC microcontrollers, for example the PIC18F2x31, provide motor control interface capability.
1.3.20 CAN Interface
CAN bus is a very popular bus system used mainly in automation applications. Some PIC18F-series microcontrollers (e.g., the PIC18F4680) provide CAN interface capability.
1.3.21 Ethernet Interface
Some PIC microcontrollers (e.g., the PIC18F97J60) provide Ethernet interface capabilities and thus are easily used in network-based applications.
1.3.22 ZigBee Interface
ZigBee, an interface similar to Bluetooth, is used in low-cost wireless home automation applications. Some PIC18F-series microcontrollers provide ZigBee interface capabilities, making the design of such wireless systems very easy.
1.4 Microcontroller Architectures
Two types of architectures are conventional in microcontrollers (see Figure 1.4). Von Neumann architecture, used by a large percentage of microcontrollers, places all memory space on the same bus; instruction and data also use the same bus.
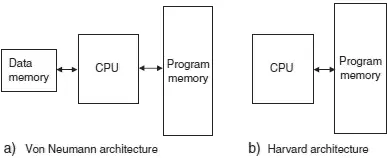
Figure 1.4: Von Neumann and Harvard architectures
In Harvard architecture (used by PIC microcontrollers), code and data are on separate buses, which allows them to be fetched simultaneously, resulting in an improved performance.
1.4.1 RISC and CISC
RISC (reduced instruction set computer) and CISC (complex instruction computer) refer to the instruction set of a microcontroller. In an 8-bit RISC microcontroller, data is 8 bits wide but the instruction words are more than 8 bits wide (usually 12, 14, or 16 bits) and the instructions occupy one word in the program memory. Thus the instructions are fetched and executed in one cycle, which improves performance.
In a CISC microcontroller, both data and instructions are 8 bits wide. CISC microcontrollers usually have over two hundred instructions. Data and code are on the same bus and cannot be fetched simultaneously.
1.5 Number Systems
To use a microprocessor or microcontroller efficiently requires a working knowledge of binary, decimal, and hexadecimal numbering systems. This section provides background information about these numbering systems for readers who are unfamiliar with them or do not know how to convert from one number system to another. Number systems are classified according to their bases. The numbering system used in everyday life is base 10, or the decimal number system. The numbering system most commonly used in microprocessor and microcontroller applications is base 16, or hexadecimal. Base 2, or binary, and base 8, or octal, number systems are also used.
1.5.1 Decimal Number System
The numbers in the decimal number system, of course, are 0, 1, 2, 3, 4, 5, 6, 7, 8, 9. The subscript 10 indicates that a number is in decimal format. For example, the decimal number 235 is shown as 235 10.
In general, a decimal number is represented as follows:
a n × 10 n + a n–1 × 10 n–1 + a n-2 × 10 n-2 + ……… + a 0 × 10 0
For example, decimal number 825 10can be shown as:
825 10 = 8 × 10 2 + 2 × 10 1 + 5 × 10 0
Similarly, decimal number 26 10can be shown as:
26 10 = 2 × 10 1 + 6 × 10 0
or
3359 10 = 3 × 10 3 + 3 × 10 2 + 5 × 10 1 + 9 × 10 0
1.5.2 Binary Number System
The binary number system consists of two numbers: 0 and 1. A subscript 2 indicates that a number is in binary format. For example, the binary number 1011 would be 10112. In general, a binary number is represented as follows:
a n × 2 n + a n–1 × 2 n–1 + a n–2 × 2 n–2 + ……… + a 0 × 2 0
For example, binary number 11102 can be shown as:
1110 2 = 1 × 2 3 + 1 × 2 2 + 1 × 2 1 + 0 × 2 0
Similarly, binary number 100011102 can be shown as:
10001110 2 = 1 × 2 7 + 0 × 2 6 + 0 × 2 5 + 0 × 2 4 + 1 × 2 3 + 1 × 2 2 + 1 × 2 1 + 0 × 2 0
1.5.3 Octal Number System
In the octal number system, the valid numbers are 0, 1, 2, 3, 4, 5, 6, 7. A subscript 8 indicates that a number is in octal format. For example, the octal number 23 appears as 23 8.
In general, an octal number is represented as:
a n × 8 n + a n–1 × 8 n–1 + a n–2 × 8 n–2 + ……… + a 0 × 8 0
For example, octal number 237 8can be shown as:
237 8 = 2 × 8 2 + 3 × 8 1 + 7 × 8 0
Similarly, octal number 1777 8can be shown as:
1777 8 = 1 × 8 3 + 7 × 8 2 + 7 × 8 1 + 7 × 8 0
1.5.4 Hexadecimal Number System
In the hexadecimal number system, the valid numbers are: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F. A subscript 16 or subscript H indicates that a number is in hexadecimal format. For example, hexadecimal number 1F can be written as 1F 16or as 1F H. In general, a hexadecimal number is represented as:
a n × 16 n + a n–1 × 16 n–1 + a n–2 × 16 n–2 + ……… + a 0 × 16 0
For example, hexadecimal number 2AC 16can be shown as:
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Advanced PIC Microcontroller Projects in C»
Представляем Вашему вниманию похожие книги на «Advanced PIC Microcontroller Projects in C» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.









Обсуждение, отзывы о книге «Advanced PIC Microcontroller Projects in C» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.