Иван Братко - Программирование на языке Пролог для искусственного интеллекта
Здесь есть возможность читать онлайн «Иван Братко - Программирование на языке Пролог для искусственного интеллекта» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1990, ISBN: 1990, Издательство: Мир, Жанр: Программирование, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Программирование на языке Пролог для искусственного интеллекта
- Автор:
- Издательство:Мир
- Жанр:
- Год:1990
- Город:Москва
- ISBN:5-03-001425-Х
- Рейтинг книги:2.5 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Программирование на языке Пролог для искусственного интеллекта: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Программирование на языке Пролог для искусственного интеллекта»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Для программистов разной квалификации, специалистов по искусственному интеллекту, для всех изучающих программирование.
Программирование на языке Пролог для искусственного интеллекта — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Программирование на языке Пролог для искусственного интеллекта», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
F( B) = с( В1, В) + H( В)
Пусть В1 — родительская вершина вершины В , а В 1, В 2, … — ее дочерние вершины, тогда, в соответствии с определениями F и H , имеем
 , если В — ИЛИ-вершина
, если В — ИЛИ-вершина
 , если В — И-вершина
, если В — И-вершина
Хотя стартовая вершина А и не имеет предшественника, будем считать, что стоимость ведущей в нее (виртуальной) дуги равна 0. Если положить h равным 0 для всех вершин И/ИЛИ-дерева, то для любого найденного оптимального решающего дерева окажется, что его стоимость, т.е. сумма стоимостей его дуг, в точности равна F(A) .
На любой стадии поиска каждый преемник ИЛИ-вершины соответствует некоторому альтернативному решающему дереву-кандидату. Процесс поиска всегда принимает решение продолжать просмотр того дерева-кандидата, для которого F -оценка минимальна. Вернемся еще раз к рис. 13.4 и посмотрим, как будет вести себя процесс, поиска на примере И/ИЛИ-графа, изображенного на этом рисунке. В начале дерево поиска состоит всего из одной вершины — стартовой вершины а , далее дерево постепенно "растет" до тех пор, пока не будет найдено решающее дерево. На рис. 13.10, показан ряд "мгновенных снимков", сделанных в процессе роста дерева поиска. Для простоты мы предположим, что h = 0 для всех вершин. Числа, приписанные вершинам на рис. 13.10 — это их F -оценки (разумеется, по мере накопления информации в процессе поиска они изменяются). Ниже даются некоторые пояснительные замечания к рис. 13.10.
После распространения поиска из первоначального дерева (снимок А) получается дерево В. Вершина а — это ИЛИ-вершина, поэтому мы имеем два решающих дерева-кандидата: b и с . Поскольку F( b) = 1 < 3 = F( c) , для продолжения поиска выбирается альтернатива b . Насколько далеко может зайти процесс роста поддерева b ? Этот процесс может продолжаться до тех пор, пока не произойдет одно из двух событий:
(1) F -оценка вершины b станет больше, чем F -оценка ее конкурента с , или
(2) обнаружится, что найдено решающее дерево.
В связи с этим, начиная просмотр поддерева-кандидата b , мы устанавливаем верхнюю границу для F( b) : F( b) ≤ 3 = F( c) . Сначала порождаются преемники d и e вершины b (снимок С),после чего F -оценка b возрастает до 3. Так как это значение не превосходит верхнюю границу, рост дерева-кандидата с корнем в b продолжается. Вершина d оказывается целевой вершиной, а после распространения поиска из вершины e на один шаг получаем дерево, показанное на снимке D. В этот момент выясняется, что F( b) = 9 > 3 , и рост дерева b прекращается. В результате процесс поиска не успевает "осознать", что h — это тоже целевая вершина и что порождено решающее дерево. Вместо этого происходит переключение активности на конкурирующую альтернативу с . Поскольку в этот момент F( b) = 9, устанавливается верхняя граница для F( c) , равная 9. Дерево-кандидат с корнем с наращивается (с учетом установленного ограничения) до тех пор, пока не возникает ситуация, показанная на снимке E. Теперь процесс поиска обнаруживает, что найдено решающее дерево (включающее в себя целевые вершины h и g ), на чем поиск заканчивается. Заметьте, что в качестве результата процесс поиска выдает наиболее дешевое из двух возможных решающих деревьев, а именно решающее дерево рис. 13.4(с).
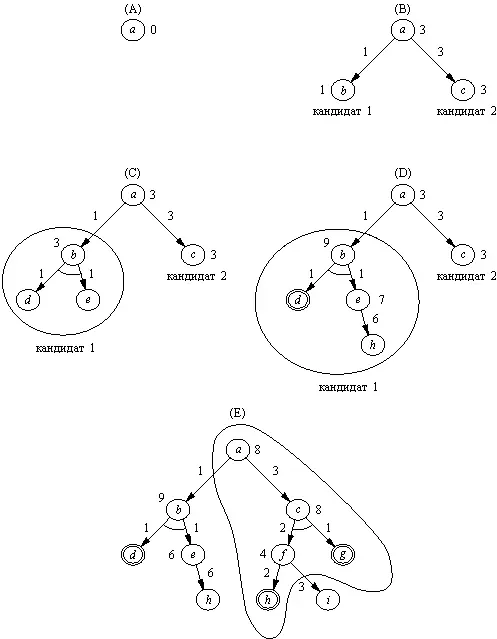
Рис. 13.10. Трассировка процесса поиска с предпочтением в И/ИЛИ-графе ( h = 0) при решении задачи рис. 13.4.
13.4.2. Программа поиска
Программа, в которой реализованы идеи предыдущего раздела, показана на рис. 13.12. Прежде, чем мы перейдем к объяснению отдельных деталей этой программы, давайте рассмотрим тот способ представления дерева поиска, который в ней используется.
Существует несколько случаев, как показано на рис. 13.11. Различные формы представления поискового дерева возникают как комбинации следующих возможных вариантов, относящихся к размеру дерева и к его "решающему статусу".
• Размер:
(1) дерево состоит из одной вершины (листа) или
(2) оно имеет корень и (непустые) поддеревья.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Программирование на языке Пролог для искусственного интеллекта»
Представляем Вашему вниманию похожие книги на «Программирование на языке Пролог для искусственного интеллекта» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.






Обсуждение, отзывы о книге «Программирование на языке Пролог для искусственного интеллекта» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.