Александр Леоненков - Самоучитель UML
Здесь есть возможность читать онлайн «Александр Леоненков - Самоучитель UML» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Программирование, Прочая околокомпьтерная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Самоучитель UML
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Самоучитель UML: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Самоучитель UML»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Первое издание.
В книге рассматриваются основы UML – унифицированного языка моделирования для описания, визуализации и документирования объектно-ориентированных систем и бизнес-процессов в ходе разработки программных приложений. Подробно описываются базовые понятия UML, необходимые для построения объектно-ориентированной модели системы с использованием графической нотации. Изложение сопровождается примерами разработки отдельных диаграмм, которые необходимы для представления информационной модели системы. Цель книги – помочь программистам освоить новую методологию разработки корпоративных программных приложений для последующего применения полученных знаний с использованием соответствующих CASE-инструментов.
Самоучитель UML — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Самоучитель UML», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Ниже представлены два примера конкретных графов (рис. 2.4). При этом первый из них (рис. 2.4, а) является неориентированным графом, а второй (рис. 2.4, б) – ориентированным графом. Как нетрудно заметить, для неориентированного графа ребро е1 соединяет вершины v1 и v2, ребро е2 – вершины v1 и v3, а ребро e3 – вершины v2 и v3 и т. д. Последнее ребро, e8, соединяет вершины v4 и v5, тем самым задается описание графа в целом. Других ребер данный граф не содержит, как не содержит других вершин, не изображенных на рисунке. Так, хотя ребра е6 и e7 визуально пересекаются, но точка их пересечения не является вершиной графа.
Для ориентированного графа (рис. 2.4, б) ситуация несколько иная. А именно, вершины v1 и v2 соединены дугой е1, для которой вершина v2 является началом дуги, а вершина v1 – концом этой дуги. Далее дуга е2 соединяет вершины v1 и v4, при этом началом дуги e2 является вершина v1, а концом – вершина v4.
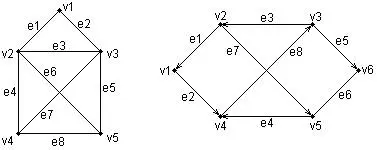
Рис. 2.4.Примеры неориентированного (а) и ориентированного (б) графов
Графы широко применяются для представления различной информации о структуре систем и процессов. Примерами подобных графических моделей могут служить: схемы автомобильных дорог, соединяющих отдельные населенные пункты; схемы телекоммуникаций, используемых для передачи информации между отдельными узлами; схемы программ, на которых указываются варианты ветвления вычислительного процесса. Общим для всех конкретных подобных моделей является возможность представления информации в графическом виде в форме соответствующего графа. При этом отдельные модели, как правило, обладают дополнительной семантикой и специальными обозначениями, характерными для той или иной предметной области.
Важными понятиями теории графов являются понятия маршрута и пути, которые ассоциируются с последовательным перемещением от вершины к вершине по соединяющим их ребрам или дугам. Для неориентированного графа маршрут определяется как конечная или бесконечная упорядоченная последовательность ребер S=<, esl, es2, ..., esk>>, таких, что каждые два соседних ребра имеют общую вершину. Нас будут интересовать только конечные маршруты S=, т. е. такие маршруты, которые состоят из конечного числа ребер. При этом ребро esl принято считать началом маршрута S, а ребро esk – концом маршрута S. Для ориентированного графа соответствующая последовательность дуг S= называется ориентированным маршрутом, если две соседние дуги имеют общую вершину, которая является концом предыдущей и началом последующей дуги.
Примерами маршрутов для неориентированного графа (рис. 2.4, а) являются последовательности ребер: S1=, S2=, S3=. Если в маршруте не повторяются ни ребра, ни вершины, как в случае S1 и S3, то такой неориентированный маршрут называется простой цепью.
Примерами ориентированных маршрутов для графа (рис. 2.4, б) являются такие последовательности дуг: S1=, S2=, S3=. Если в ориентированном маршруте не повторяются ни ребра, ни вершины, как в случае S1 и S2, то такой ориентированный маршрут называется путем. Последнее понятие также иногда применяется для обозначения простой цепи в неориентированных графах и для определения специального класса графов, так называемых деревьев. В общем случае деревья служат для графического представления иерархических структур или иерархий, занимающих важное место в ООАП.
Деревом в теории графов называется такой граф D=, между любыми двумя вершинами которого существует единственная простая цепь, т. е. неориентированный маршрут, у которого вершины и ребра не повторяются. Применительно к ориентированным графам соответствующее определение является более сложным, поскольку основывается на выделении некоторой специальной вершины v0, которая получила специальное название корневой вершины или просто – корня. В этом случае ориентированный граф D= называется ориентированным деревом или сокращенно – деревом, если между корнем дерева v0 и любой другой вершиной существует единственный путь, берущий начало в v0. Ниже представлены два примера деревьев: неориентированного дерева (рис. 2.5, а) и ориентированного дерева (рис. 2.5, б).
В случае неориентированного дерева (рис. 2.5, а) любая из вершин графа может быть выбрана в качестве корня. Подобный выбор определяется специфическими особенностями решаемой задачи. Так, вершина v1 может рассматриваться в качестве корня неориентированного дерева, поскольку между v1 и любой другой вершиной дерева всегда существует единственная простая цепь по определению (или, что менее строго, единственный неориентированный путь).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Самоучитель UML»
Представляем Вашему вниманию похожие книги на «Самоучитель UML» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Самоучитель UML» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.