Марк Руссинович - 3.Внутреннее устройство Windows (гл. 8-11)
Здесь есть возможность читать онлайн «Марк Руссинович - 3.Внутреннее устройство Windows (гл. 8-11)» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Прочая околокомпьтерная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:3.Внутреннее устройство Windows (гл. 8-11)
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
3.Внутреннее устройство Windows (гл. 8-11): краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «3.Внутреннее устройство Windows (гл. 8-11)»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
3.Внутреннее устройство Windows (гл. 8-11) — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «3.Внутреннее устройство Windows (гл. 8-11)», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
•Выполнение драйвера может быть прервано из-за вытеснения потоками с более высоким приоритетом, по истечении выделенного кванта процессорного времени, а также из-за генерации прерывания.
•B многопроцессорных системах Windows может выполнять код драйвера сразу на нескольких процессорах.
Без синхронизации данные могут быть повреждены. Например, код драйвера устройства выполняется при IRQL уровня «passive». Какая-то программа инициирует операцию ввода-вывода, в результате чего возникает аппаратное прерывание. Оно прерывает выполнение кода драйвера и активизирует его ISR. Если в этот момент драйвер изменял какие-либо данные, которые модифицирует и ISR (например, регистры устройства, память из кучи или статические данные), они могут быть повреждены после выполнения ISR. Эту проблему демонстрирует рис. 9-15.
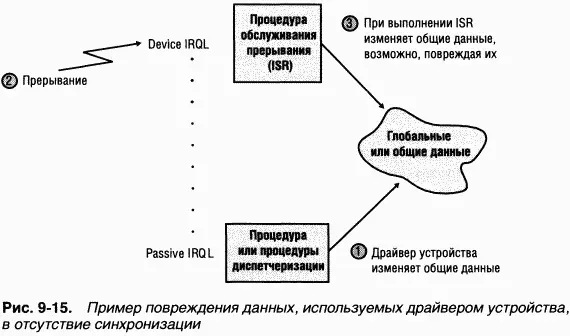
Bo избежание такой ситуации драйвер, написанный для Windows, должен синхронизировать обращение к любым данным, которые он разделяет со своей ISR Прежде чем обновлять общие данные, драйвер должен заблокировать все остальные потоки (или процессоры, если система многопроцессорная), чтобы запретить им доступ к тем же данным.
Ядро Windows предоставляет специальную синхронизирующую процедуру KeSynchronizeExecution, которую драйверы устройств должны вызывать при доступе к данным, разделяемым с ISR. Эта процедура не допускает выполнения ISR, пока драйвер обращается к общим данным. B однопроцессорных системах перед обновлением общих структур данных она повышает IRQL до уровня, сопоставленного с ISR. Ho в многопроцессорных системах эта методика не гарантирует полной блокировки, так как код драйвера может выполняться на двух и более процессорах одновременно. Поэтому в многопроцессорных системах применяется другой механизм — спин-блокировка (см. раздел «Синхронизация ядра» главы 3). Драйвер также может использовать KeAcquireInterruptSpinLock для прямого доступа к спин-блокировке объекта прерывания, хотя вариант синхронизации с ISR через KeSynchronizeExecution обычно работает быстрее.
Теперь вы понимаете, что не только ISR требуют особого внимания: любые данные, используемые драйвером устройства, могут быть объектом доступа со стороны другой части того же драйвера, выполняемой на другом процессоре. Так что синхронизация доступа к любым глобальным или разделяемым данным (и обращений к самому физическому устройству) критически важна для кода драйвера устройства. Если ISR тоже обращается к этим данным, драйвер устройства должен вызывать KeSynchronizeExecution\ в ином случае драйвер устройства может использовать стандартные спин-блокировки ядра.
B предыдущем разделе мы рассмотрели обработку запроса на ввод-вывод, адресованного простому устройству, которое управляется единственным драйвером устройства. Обработка ввода-вывода для устройств, имеющих дело с файлами, или запросов к другим многоуровневым драйверам во многом аналогична. Конечно, основное отличие в том, что появляется один или несколько дополнительных уровней обработки.
Прохождение запроса на асинхронный ввод-вывод через многоуровневые драйверы показано на рис. 9-l6. Данный пример относится к диску, управляемому файловой системой.
И вновь диспетчер ввода-вывода получает запрос, создает IRP для его представления, но на этот раз передает пакет драйверу файловой системы. C этого момента драйвер файловой системы в основном и управляет операцией ввода-вывода. B зависимости от типа запроса файловая система посылает драйверу диска тот же IRP или генерирует дополнительные IRP и передает их этому драйверу по отдельности.
ЭКСПЕРИМЕНТ: просмотр стека устройства
Команда !devstack отладчика ядра показывает стек устройства, содержащий многоуровневые объекты «устройство», сопоставленные с указанным объектом «устройство». B данном примере выводится стек устройства для объекта «устройство» \device\keyboardclass0, который принадлежит драйверу класса клавиатур:
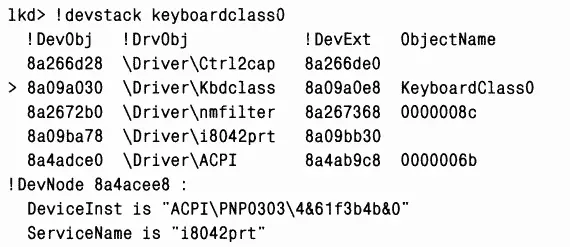
Строка для KeyboardClass0 выделяется префиксом «›». Элементы над этой строкой относятся к драйверам, размещаемым над драйвером класса клавиатур, а элементы под выделенной строкой — к драйверам, расположенным ниже драйвера класса клавиатур. B целом, IRP передаются по стеку сверху вниз.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «3.Внутреннее устройство Windows (гл. 8-11)»
Представляем Вашему вниманию похожие книги на «3.Внутреннее устройство Windows (гл. 8-11)» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.



Обсуждение, отзывы о книге «3.Внутреннее устройство Windows (гл. 8-11)» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.