Qing Li - Real-Time Concepts for Embedded Systems
Здесь есть возможность читать онлайн «Qing Li - Real-Time Concepts for Embedded Systems» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: San Francisco, Год выпуска: 2003, ISBN: 2003, Издательство: CMP books, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Real-Time Concepts for Embedded Systems
- Автор:
- Издательство:CMP books
- Жанр:
- Год:2003
- Город:San Francisco
- ISBN:1-57820-124-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Real-Time Concepts for Embedded Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Real-Time Concepts for Embedded Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Delve into the details of real-time programming so you can develop a working knowledge of the common design patterns and program structures of real-time operating systems (RTOS). The objects and services that are a part of most RTOS kernels are described and real-time system design is explored in detail. You learn how to decompose an application into units and how to combine these units with other objects and services to create standard building blocks. A rich set of ready-to-use, embedded design “building blocks” is also supplied to accelerate your development efforts and increase your productivity.
Experienced developers new to embedded systems and engineering or computer science students will both appreciate the careful balance between theory, illustrations, and practical discussions. Hard-won insights and experiences shed new light on application development, common design problems, and solutions in the embedded space. Technical managers active in software design reviews of real-time embedded systems will find this a valuable reference to the design and implementation phases.
Qing Li is a senior architect at Wind River Systems, Inc., and the lead architect of the company’s embedded IPv6 products. Qing holds four patents pending in the embedded kernel and networking protocol design areas. His 12+ years in engineering include expertise as a principal engineer designing and developing protocol stacks and embedded applications for the telecommunications and networks arena. Qing was one of a four-member Silicon Valley startup that designed and developed proprietary algorithms and applications for embedded biometric devices in the security industry.
Caroline Yao has more than 15 years of high tech experience ranging from development, project and product management, product marketing, business development, and strategic alliances. She is co-inventor of a pending patent and recently served as the director of partner solutions for Wind River Systems, Inc. About the Authors
Real-Time Concepts for Embedded Systems — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Real-Time Concepts for Embedded Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
1.1.8 Software Storage and Upgradeability
Code for embedded systems (such as the real-time embedded operating system, the system software, and the application software) is commonly stored in ROM and NVRAM memory devices. In Chapter 3, we discuss the embedded system booting process and the steps involved in extracting code from these storage devices. Upgrading an embedded system can mean building new PROM, deploying special equipment and/or a special method to reprogram the EPROM, or reprogramming the flash memory.
The choice of software storage device has an impact on development. The process to reprogram an EPROM when small changes are made in the software can be tedious and time-consuming, and this occurrence is common during development. Removing an EPROM device from its socket can damage the EPROM; worse yet, the system itself can be damaged if careful handling is not exercised.
The choice of the storage device can also have an impact on the overall cost of maintenance. Although PROM and EPROM devices are inexpensive, the cost can add up if a large volume of shipped systems is in the field. Upgrading an embedded system in these cases means shipping replacement PROM and EPROM chips. The embedded system can be upgraded without the need for chip replacement and can be upgraded dynamically over a network if flash memory or EEPROM is used as the code storage device (see the following sidebar).
Armed with the information presented in the previous sections, we can now attempt to answer the questions raised earlier. A personal computer is not an embedded system because it is built using a general-purpose processor and is built independently from the software that runs on it. The software applications developed for personal computers, which run operating systems such as FreeBSD or Windows, are developed natively (as opposed to cross-developed) on those operating systems. For the same reasons, an Apple iBook used only as a DVD player is used like an embedded system but is not an embedded system.
With non-volatile content and without the need for an external power source.
· Mask Programmed ROM- the memory content is programmed during the manufacturing process. Once programmed, the content cannot be changed. It cannot be reprogrammed.
· Field Programmable ROM (PROM) - the memory content can be custom-programmed one time. The memory content cannot change once programmed.
· Erasable Programmable ROM( EPROM) - an EPROM device can be custom-programmed, erased, and reprogrammed as often as required within its lifetime (hundreds or even thousands of times). The memory content is non-volatile once programmed. Traditional EPROM devices are erased by exposure to ultraviolet (UV) light. An EPROM device must be removed from its housing unit first. It is then reprogrammed using a special hardware device called an EPROM programmer.
· Electrically Erasable Programmable ROM (EEPROMor E2PROM)- modern EPROM devices are erased electrically and are thus called EEPROM. One important difference between an EPROM and an EEPROM device is that with the EEPROM device, memory content of a single byte can be selectively erased and reprogrammed. Therefore, with an EEPROM device, incremental changes can be made. Another difference is the EEPROM can be reprogrammed without a special programmer and can stay in the device while being reprogrammed. The versatility of byte-level programmability of the EEPROM comes at a price, however, as programming an EEPROM device is a slow process.
· Flash Memory- the flash memory is a variation of EEPROM, which allows for block-level (e.g., 512-byte) programmability that is much faster than EEPROM.
Also called Read/Write Memory, requires external power to maintain memory content. The term random access refers to the ability to access any memory cell directly. RAM is much faster than ROM. Two types of RAM that are of interest:
· Dynamic RAM( DRAM) - DRAM is a RAM device that requires periodic refreshing to retain its content.
· Static RAM( SRAM) - SRAM is a RAM device that retains its content as long as power is supplied by an external power source. SRAM does not require periodic refreshing and it is faster than DRAM.
· Non-Volatile RAM (NVRAM)- NVRAM is a special type of SRAM that has backup battery power so it can retain its content after the main system power is shut off. Another variation of NVARM combines SRAM and EEPROM so that its content is written into the EEPROM when power is shut off and is read back from the EEPROM when power is restored.
1.2 Real-Time Embedded Systems
In the simplest form, real-time systems can be defined as those systems that respond to external events in a timely fashion, as shown in Figure 1.5. The response time is guaranteed. We revisit this definition after presenting some examples of real-time systems.

Figure 1.5: A simple view of real-time systems.
External events can have synchronous or asynchronous characteristics. Responding to external events includes recognizing when an event occurs, performing the required processing as a result of the event, and outputting the necessary results within a given time constraint. Timing constraints include finish time, or both start time and finish time.
A good way to understand the relationship between real-time systems and embedded systems is to view them as two intersecting circles, as shown in Figure 1.6. It can be seen that not all embedded systems exhibit real-time behaviors nor are all real-time systems embedded. However, the two systems are not mutually exclusive, and the area in which they overlap creates the combination of systems known as real-time embedded systems .

Figure 1.6: Real-time embedded systems.
Knowing this fact and because we have covered the various aspects of embedded systems in the previous sections, we can now focus our attention on real-time systems.
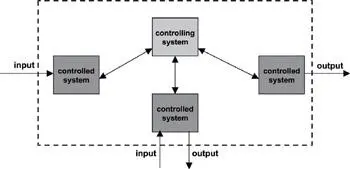
Figure 1.7: Structure of real-time systems.
1.2.1 Real-Time Systems
The environment of the real-time system creates the external events. These events are received by one or more components of the real-time system. The response of the real-time system is then injected into its environment through one or more of its components. Decomposition of the real-time system, as shown in Figure 1.5, leads to the general structure of real-time systems.
The structure of a real-time system, as shown in Figure 1.7, is a controlling system and at least one controlled system. The controlling system interacts with the controlled system in various ways. First, the interaction can be periodic , in which communication is initiated from the controlling system to the controlled system. In this case, the communication is predictable and occurs at predefined intervals. Second, the interaction can be aperiodic , in which communication is initiated from the controlled system to the controlling system. In this case, the communication is unpredictable and is determined by the random occurrences of external events in the environment of the controlled system. Finally, the communication can be a combination of both types. The controlling system must process and respond to the events and information generated by the controlled system in a guaranteed time frame.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Real-Time Concepts for Embedded Systems»
Представляем Вашему вниманию похожие книги на «Real-Time Concepts for Embedded Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Real-Time Concepts for Embedded Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.