Уильям Стивенс - UNIX - разработка сетевых приложений
Здесь есть возможность читать онлайн «Уильям Стивенс - UNIX - разработка сетевых приложений» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2007, ISBN: 2007, Издательство: Питер, Жанр: ОС и Сети, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:UNIX: разработка сетевых приложений
- Автор:
- Издательство:Питер
- Жанр:
- Год:2007
- Город:Санкт-Петербург
- ISBN:5-94723-991-4
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
UNIX: разработка сетевых приложений: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «UNIX: разработка сетевых приложений»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
UNIX: разработка сетевых приложений — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «UNIX: разработка сетевых приложений», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
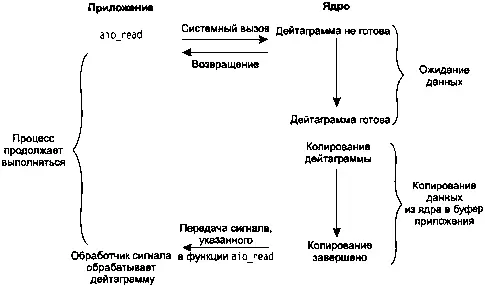
Рис. 6.5. Модель асинхронного ввода-вывода
Мы вызываем функцию aio_read(функции асинхронного ввода-вывода POSIX начинаются с aio_или lio_) и передаем ядру дескриптор, указатель на буфер, размер буфера (те же три аргумента, что и для функции read), смещение файла (аналогично функции lseek), а также указываем, как уведомить нас, когда операция полностью завершится. Этот системный вызов завершается немедленно, и наш процесс не блокируется в ожидании завершения ввода-вывода. В этом примере предполагается, что мы указали ядру сгенерировать некий сигнал, когда операция завершится. Сигнал не генерируется до тех пор, пока данные не скопированы в наш буфер приложения, что отличает эту модель от модели ввода-вывода, управляемого сигналом.
На момент написания книги только некоторые системы поддерживали асинхронный ввод-вывод стандарта POSIX. Например, мы не уверены, что какие-либо системы поддерживают его для сокетов. Мы используем его только как пример для сравнения с моделью управляемого сигналом ввода-вывода.
Сравнение моделей ввода-вывода
На рис. 6.6 сравнивается пять различных моделей ввода-вывода. Здесь видно главное отличие четырех первых моделей в первой фазе, поскольку вторая фаза у них одна и та же: процесс блокируется в вызове функции recvfromна то время, пока данные копируются из ядра в буфер вызывающего процесса. Асинхронный ввод-вывод отличается от первых четырех моделей в обеих фазах.
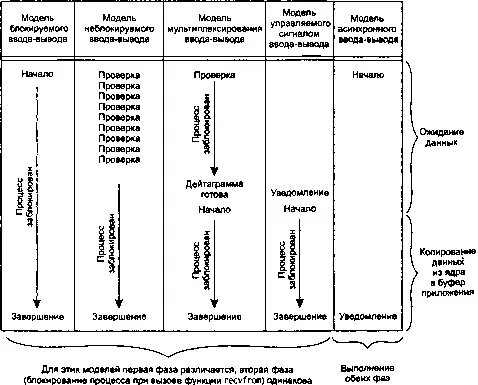
Рис. 6.6. Сравнение моделей ввода-вывода
Сравнение синхронного и асинхронного ввода-вывода
POSIX дает следующие определения этих терминов:
■ Операция синхронного ввода-вывода блокирует запрашивающий процесс до тех пор, пока операция ввода-вывода не завершится.
■ Операция асинхронного ввода-вывода не вызывает блокирования запрашивающего процесса.
Используя эти определения, можно сказать, что первые четыре модели ввода- вывода — блокируемая, неблокируемая, модель мультиплексирования ввода-вывода и модель управляемого сигналом ввода-вывода — являются синхронными, поскольку фактическая операция ввода-вывода (функция recvfrom) блокирует процесс. Только модель асинхронного ввода-вывода соответствует определению асинхронного ввода-вывода.
6.3. Функция select
Эта функция позволяет процессу сообщить ядру, что необходимо подождать, пока не произойдет одно из некоторого множества событий, и вывести процесс из состояния ожидания, только когда произойдет одно или несколько таких событий или когда пройдет заданное количество времени.
Например, мы можем вызвать функцию selectи сообщить ядру, что возвращать управление нужно только когда наступит любое из следующих событий:
■ любой дескриптор из набора {1, 4, 5} готов для чтения;
■ любой дескриптор из набора {2, 7} готов для записи;
■ любой дескриптор из набора {1, 4} вызывает исключение, требующее обработки;
■ истекает 10,2 с.
Таким образом, мы сообщаем ядру, какие дескрипторы нас интересуют (готовые для чтения, готовые для записи или требующие обработки исключения) и как долго нужно ждать. Интересующие нас дескрипторы не ограничиваются сокетами: любой дескриптор можно проверить с помощью функции select.
Беркли-реализации всегда допускали мультиплексирование ввода-вывода с любыми дескрипторами. Система SVR3 ограничивала мультиплексирование ввода-вывода дескрипторами, которые являлись устройствами STREAMS (см. главу 31), но это ограничение было снято в SVR4.
#include
#include
int select(int maxfdp1 , fd_set * readset , fd_set * writeset ,
fd_set * exceptset , const struct timeval * timeout );
Возвращает: положительное число - счетчик готовых дескрипторов, 0 в случае тайм-аута, -1 в случае ошибки
Описание этой функции мы начнем с последнего аргумента, который сообщает ядру, сколько следует ждать, пока один из заданных дескрипторов не будет готов. Структура timevalзадает число секунд и микросекунд:
struct timeval {
long tv_sec; /* секунды */
long tv_usec; /* микросекунды */
};
С помощью этого аргумента можно реализовать три сценария:
Читать дальшеИнтервал:
Закладка:
Похожие книги на «UNIX: разработка сетевых приложений»
Представляем Вашему вниманию похожие книги на «UNIX: разработка сетевых приложений» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «UNIX: разработка сетевых приложений» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.