Уильям Стивенс - UNIX - разработка сетевых приложений
Здесь есть возможность читать онлайн «Уильям Стивенс - UNIX - разработка сетевых приложений» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2007, ISBN: 2007, Издательство: Питер, Жанр: ОС и Сети, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:UNIX: разработка сетевых приложений
- Автор:
- Издательство:Питер
- Жанр:
- Год:2007
- Город:Санкт-Петербург
- ISBN:5-94723-991-4
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
UNIX: разработка сетевых приложений: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «UNIX: разработка сетевых приложений»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
UNIX: разработка сетевых приложений — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «UNIX: разработка сетевых приложений», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Когда мы определяем сокет как неблокируемый, мы тем самым сообщаем ядру следующее: «когда запрашиваемая нами операция ввода-вывода не может быть завершена без перевода процесса в состояние ожидания, следует не переводить процесс в состояние ожидания, а возвратить ошибку». Неблокируемый ввод-вывод мы описываем подробно в главе 16, а на рис. 6.2 лишь демонстрируем его свойства.
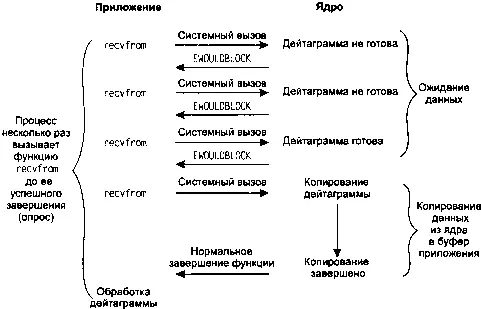
Рис. 6.2. Модель неблокируемого ввода-вывода
В первых трех случаях вызова функции recvfromданных для возвращения нет, поэтому ядро немедленно возвращает ошибку EWOULDBLOCK. Когда мы в четвертый раз вызываем функцию recvfrom, дейтаграмма готова, поэтому она копируется в буфер приложения и функция recvfromуспешно завершается. Затем мы обрабатываем данные.
Такой процесс, когда приложение находится в цикле и вызывает функцию recvfromна неблокируемом дескрипторе, называется опросом ( polling ). Приложение последовательно опрашивает ядро, чтобы увидеть, что какая-то операция может быть выполнена. Часто это пустая трата времени процессора, но такая модель все же иногда используется, обычно в специализированных системах.
Модель мультиплексирования ввода-вывода
В случае мультиплексирования ввода-вывода мы вызываем функцию selectили poll, и блокирование происходит в одном из этих двух системных вызовов, а не в действительном системном вызове ввода-вывода. На рис. 6.3 обобщается модель мультиплексирования ввода-вывода.
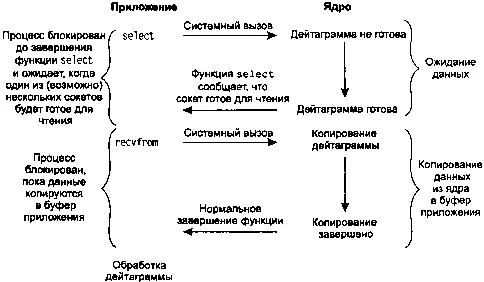
Рис. 6.3. Модель мультиплексирования ввода-вывода
Процесс блокируется в вызове функции select, ожидая, когда дейтаграммный сокет будет готов для чтения. Когда функция selectвозвращает сообщение, что сокет готов для чтения, процесс вызывает функцию recvfrom, чтобы скопировать дейтаграмму в буфер приложения.
Сравнивая рис. 6.3 и 6.1, мы не найдем в модели мультиплексирования ввода- вывода каких-либо преимуществ, более того, она даже обладает незначительным недостатком, поскольку использование функции selectтребует двух системных вызовов вместо одного. Но преимущество использования функции select, которое мы увидим далее в этой главе, состоит в том, что мы сможем ожидать готовности не одного дескриптора, а нескольких.
Разновидностью данного способа мультиплексирования является многопоточное программирование с блокируемым вводом-выводом. Отличие состоит в том, что вместо вызова select с блокированием программа использует несколько потоков (по одному на каждый дескриптор), которые могут блокироваться в вызовах типа recvfrom.
Модель ввода-вывода, управляемого сигналом
Мы можем сообщить ядру, что необходимо уведомить процесс о готовности дескриптора с помощью сигнала SIGIO. Такая модель имеет название ввод-вывод, управляемый сигналом ( signal-driven I/O ). Она представлена в обобщенном виде на рис. 6.4.
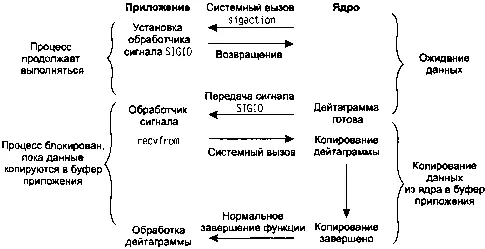
Рис. 6.4. Модель управляемого сигналом ввода-вывода
Сначала мы включаем на сокете управляемый сигналом ввод-вывод (об этом рассказывается в разделе 22.2) и устанавливаем обработчик сигнала при помощи системного вызова sigaction. Возвращение из этого системного вызова происходит незамедлительно, и наш процесс продолжается (он не блокирован). Когда дейтаграмма готова для чтения, для нашего процесса генерируется сигнал SIGIO. Мы можем либо прочитать дейтаграмму из обработчика сигнала с помощью вызова функции recvfromи затем уведомить главный цикл о том, что данные готовы для обработки (см. раздел 22.3), либо уведомить основной цикл и позволить ему прочитать дейтаграмму.
Независимо от способа обработки сигнала эта модель имеет то преимущество, что во время ожидания дейтаграммы не происходит блокирования. Основной цикл может продолжать выполнение, ожидая уведомления от обработчика сигнала о том, что данные готовы для обработки либо дейтаграмма готова для чтения.
Модель асинхронного ввода-вывода
Асинхронный ввод-вывод был введен в редакции стандарта POSIX.1g 1993 г. (расширения реального времени). Мы сообщаем ядру, что нужно начать операцию и уведомить нас о том, когда вся операция (включая копирование данных из ядра в наш буфер) завершится. Мы не обсуждаем эту модель в этой книге, поскольку она еще не получила достаточного распространения. Ее основное отличие от модели ввода-вывода, управляемого сигналом, заключается в том, что при использовании сигналов ядро сообщает нам, когда операция ввода-вывода может быть инициирована , а в случае асинхронного ввода-вывода — когда операция завершается . Пример этой модели приведен на рис. 6.5.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «UNIX: разработка сетевых приложений»
Представляем Вашему вниманию похожие книги на «UNIX: разработка сетевых приложений» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «UNIX: разработка сетевых приложений» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.