Роберт Лав - Разработка ядра Linux
Здесь есть возможность читать онлайн «Роберт Лав - Разработка ядра Linux» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2006, ISBN: 2006, Издательство: Издательский дом Вильямс, Жанр: ОС и Сети, Программирование, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Разработка ядра Linux
- Автор:
- Издательство:Издательский дом Вильямс
- Жанр:
- Год:2006
- Город:Москва
- ISBN:5-8459-1085-4
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Разработка ядра Linux: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Разработка ядра Linux»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Книга может быть рекомендована как начинающим, так и опытным разработчикам программного обеспечения, а также в качестве дополнительных учебных материалов.
Разработка ядра Linux — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Разработка ядра Linux», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Это максимальное значение является важным, потому что оно определяет максимальное количество процессов, которые одновременно могут существовать в системе. Хотя значения 32768 и достаточно для офисного компьютера, для больших серверов может потребоваться значительно больше процессов. Чем меньше это значение, тем скорее нумерация процессов будет начинаться сначала, что приводит к нарушению полезного свойства: больший номер процесса соответствует процессу, который запустился позже. Если есть желание нарушить в системе обратную совместимость со старыми приложениями, то администратор может увеличить это максимальное значение во время работы системы с помощью записи его в файл /proc/sys/kernel/pid_max.
Обычно в ядре на задачи ссылаются непосредственно с помощью указателя на их структуры task_struct. И действительно, большая часть кода ядра, работающего с процессами, работает прямо со структурами task_struct. Следовательно, очень полезной возможностью было бы быстро находить дескриптор процесса, который выполняется в данный момент, что и делается с помощью макроса current. Этот макрос должен быть отдельно реализован для всех поддерживаемых аппаратных платформ. Для одних платформ указатель на структуру task_structпроцесса, выполняющегося в данный момент, хранится в регистре процессора, что обеспечивает более эффективный доступ. Для других платформ, у которых доступно меньше регистров процессора, чтобы зря не тратить регистры, используется тот факт, что структура thread_infoхранится в стеке ядра. При этом вычисляется положение структуры thread_info, а вслед за этим и адрес структуры task_structпроцесса.
Для платформы x86 значение параметра currentвычисляется путем маскирования 13 младших бит указателя стека для получения адреса структуры thread_info. Это может быть сделано с помощью функции current_thread_info(). Соответствующий код на языке ассемблера показан ниже.
movl $-8192, %eax
andl %esp, %eax
Окончательно значение параметра currentполучается путем разыменования значения поля taskполученной структуры thread_info:
current_thread_info()->task;
Для контраста можно сравнить такой подход с используемым на платформе PowerPC (современный процессор на основе RISC-архитектуры фирмы IBM), для которого значение переменной currentхранится в регистре процессора r2. На платформе PPC такой подход можно использовать, так как, в отличие от платформы x86, здесь регистры процессора доступны в изобилии. Так как доступ к дескриптору процесса — это очень частая и важная операция, разработчики ядра для платформы PPC сочли правильным пожертвовать одним регистром для этой цели.
Состояние процесса
Поле stateдескриптора процесса описывает текущее состояние процесса (рис. 3.3). Каждый процесс в системе гарантированно находится в одном из пяти различных состояний.
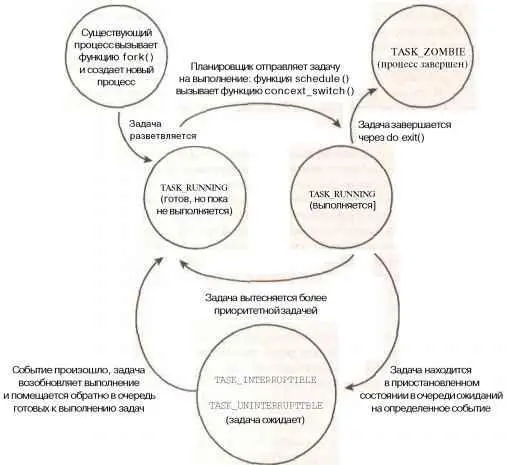
Рис. 3.3. Диаграмма состояний процесса
Эти состояния представляются значением одного из пяти возможных флагов, описанных ниже.
• TASK_RUNNING — процесс готов к выполнению (runnable). Иными словами, либо процесс выполняется в данный момент, либо находится в одной из очередей процессов, ожидающих на выполнение (эти очереди, runqueue, обсуждаются в главе 4. "Планирование выполнения процессов").
• TASK_INTERRUPTIBLE — процесс приостановлен (находится в состоянии ожидания, sleeping ), т.е. заблокирован в ожидании выполнения некоторого условия. Когда это условие выполнится, ядро переведет процесс в состояние TASK_RUNNING. Процесс также возобновляет выполнение (wake up) преждевременно при получении им сигнала.
• TASK_UNINTERRUPTIBLE — аналогично TASK_INTERRUPTIBLE, за исключением того, что процесс не возобновляет выполнение при получении сигнала. Используется в случае, когда процесс должен ожидать беспрерывно или когда ожидается, что некоторое событие может возникать достаточно часто. Так как задача в этом состоянии не отвечает на сигналы, TASK_UNINTERRUPTIBLEиспользуется менее часто, чем TASK_INTERRUPTIBLE [13] Именно из-за этого появляются наводящие ужас "неубиваемые" процессы, для которых команда ps(1) показывает значение состояния, равное D . Так как процесс не отвечает на сигналы, ему нельзя послать сигнал SIGKILL . Более того, завершать такой процесс было бы неразумно, так как этот процесс, скорее всего, выполняет какую-либо важную операцию и может удерживать семафор.
.
Интервал:
Закладка:
Похожие книги на «Разработка ядра Linux»
Представляем Вашему вниманию похожие книги на «Разработка ядра Linux» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Разработка ядра Linux» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.