Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С
Здесь есть возможность читать онлайн «Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Издательский дом «ДМК-пресс», Жанр: Компьютерное железо, Программирование, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С
- Автор:
- Издательство:Издательский дом «ДМК-пресс»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0034-2
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание содержит материал, охватывающий все вопросы проектирования, включает множество заданий для самостоятельной работы, примеры программирования, примеры аппаратных решений и эксперименты по исследованию работы различных подсистем микроконтроллеров.
Данная книга является прекрасным учебным пособием для студентов старших курсов технических университетов, которые предполагают связать свою профессиональную деятельность с проектированием и внедрением встраиваемых микропроцессорных систем. Книга также будет полезна разработчикам радиоэлектронной аппаратуры на микроконтроллерах.
Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Для ограничения энергии потребления разработчики используют разные решения. Одним из них является снижение частоты тактирования МК. Однако такая мера имеет ограничение, поскольку для любой задачи реального времени имеется ограничение снизу по вычислительной производительности. Другим решением (или дополнительным к первому) является временное отключение питания тех периферийных модулей МК, которые в данный момент исполнения программы не используются. Аппаратные средства современных МК предоставляют такую возможность. Последний способ требует особого внимания разработчика, поскольку отключение какого–либо модуля в составе системы может привести к изменению электрических характеристик ее входов и выходов, которое не должно сказаться на работоспособности системы в целом.
1.2.4. Интерфейс пользователя и интерфейс сопряжения с объектом
Любая встраиваемая система должна взаимодействовать с пользователем или с окружающей средой. Например, перемещающийся в пространстве робот (рис. 1.2) должен с помощью инфракрасных датчиков обнаруживать препятствия и обходить их. Микроволновая печь должна взаимодействовать с человеком посредством кнопок режимов, установленных на передней панели прибора. А система охранной сигнализации должна взаимодействовать как с датчиками сохранности помещения, так и с органами управления человеком. Подобные примеры могут быть продолжены. И на их основе можно сделать вывод, что для разработчика встраиваемых систем вопросы выработки решений по взаимодействию с человеком и с объектом управления являются чрезвычайно важной задачей. Причем возможные решения лежат на стыке выбора типа датчиков (включая принцип действия датчика), дизайн–проекта, конструктивного исполнения, аппаратного решения электронных блоков и, наконец, алгоритмов обработки информации.
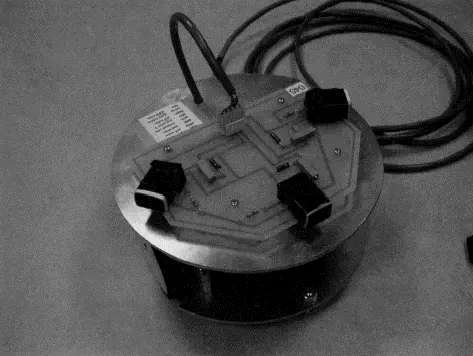
Рис. 1.2.Робот, способный двигаться сквозь лабиринт
1.2.5. Многозадачность
Большинство встраиваемых систем должно обслуживать в реальном времени сразу несколько внешних устройств. Причем периоды повторения алгоритмов вычисления в реальном времени для каждого из устройств различаются. При разработке таких систем разработчик стоит перед дилеммой, использовать для решения задачи один высокоскоростной МК, или сделать мультипроцессорную систему, в которой для каждой задачи будет использован собственный микропроцессор или микроконтроллер.
1.2.6. Минимизация стоимости
Большое количество встраиваемых систем предназначено для управления недорогими устройствами массового спроса, такими как СВЧ печь, мобильный телефон и т.п. Успех реализации таких устройств будет определяться их конечной стоимостью, что накладывает жесткие ограничения на стоимость встраиваемой системы. Каждая встраиваемая система имеет множество возможных решений, как на уровне способа реализации (микроконтроллер или программируемая логическая матрица, вариации интерфейсных схем к тому и другому решениям), так и на уровне выбора конкретной элементной базы. Поэтому выбор правильной стратегии проектирования с целью минимизации стоимости — одна из основных проблем проектирования встраиваемой системы.
1.2.7. Ограничение объема памяти
Если Вы достаточно грамотный пользователь персонального компьютера, то хорошо знакомы с постоянным увеличением объема памяти ПК, которое не сопровождается пропорциональным увеличением ее стоимости. Поэтому программисты для ПК совершенствуют свои продукты, в том числе, используя без ограничения увеличение объема памяти программ. Встраиваемые системы не предоставляют разработчику такой возможности, поскольку объем резидентной памяти МК оказывает существенное влияние на его стоимость. Современная элементная база позволяет выполнить мобильный телефон с несколькими Гб внутренней памяти, однако какое количество покупателей пожелает купить достаточно дорогое устройство? Поэтому разработка решений с минимизацией затрат памяти — одно из направлений совершенствования встраиваемых систем.
1.2.8. Программно–аппаратный дуализм
Большое количество встраиваемых систем могут быть реализованы как на МК с соответствующей управляющей программой, так и на основе высокоинтегрированной жесткой логики, например, на программируемых логических ИС. Первое решение обладает большей гибкостью, поскольку управляющая программа может быть многократно доработана без изменения аппаратного решения устройства. Второе решение обязательно будет более быстродействующим по сравнению с первым. Возможны и комбинированные варианты решения, при которых часть функций будет возложена на МК, а часть — на устройства жесткой логики. Выбор способа реализации остается за разработчиком.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С»
Представляем Вашему вниманию похожие книги на «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.