Грег Иган - Лестница Шильда
Здесь есть возможность читать онлайн «Грег Иган - Лестница Шильда» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2016, Издательство: М.И.Ф., Жанр: Фантастика и фэнтези, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Лестница Шильда
- Автор:
- Издательство:М.И.Ф.
- Жанр:
- Год:2016
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Лестница Шильда: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Лестница Шильда»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Тем более, что, возможно, люди, сами того не осознавая, только что создали новую вселенную…
Greg Egan. Schild's Ladder. 2002.
Перевод с английского: Конрад Сташевски. (Неофициальное электронное издание)
Лестница Шильда — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Лестница Шильда», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Но в действительности такого коллапса не происходит. Если измерения произвести с объединенной системой, А + В , окажется, что она находится в чистом квантовом состоянии, а все компоненты исходного вектора состояния системы А сохранились. Классической физикой потому и пользуются, что полная информация, необходимая для обнаружения квантовых феноменов на макроуровне, нам, как правило, недоступна.
На моем сайте:
http: //gregegan.customer.netspace.net .а u / SCHILD / Decoherence / DecoherenceApplet . html
доступен с тремя экспериментами, в которых показано, как извлечь, казалось бы, потерянную информацию о состоянии запутанной части составной системы при наблюдении за системой в целом.
Спиновые сети ― состояния квантовой геометрии в теории квантовой гравитации, открытые Ли Смолиным и Карло Ровелли. Это понятие — ключевой концептуальный предшественник вымышленной физики «Лестницы Шильда».
Одним из способов описания геометрии пространства выступает описание способа, каким векторы переносятся вдоль любого пути — этот процесс известен под названием «параллельного переноса». В искривленном пространстве параллельный перенос по петле обычно поворачивает вектор относительно исходного направления; известным следствием отсюда выступает тот факт, что при этом сумма углов треугольника отличается от 180 градусов.
Если квантовомеханическая частица переносится по определенному пути в пространстве, начиная его со спином j ,компонента которого вдоль оси Z равна т, параллельный перенос, вообще говоря, изменит значение спинового состояния частицы. Это явление в квантовой механике соответствует повороту классического вектора. Например, если электрон начинает перемещение со спином ↑, он может перейти в состояние суперпозиции компонент со спинами ↑и ↓или же изменить фазу; это зависит от того, какое именно вращение он претерпевает, то есть от кривизны области пространства, которую электрон пересекает. Итак, простым способом определения геометрии пространства видится следующий: взять электрон, перенести его по петле и посмотреть, как изменилось спиновое состояние частицы.
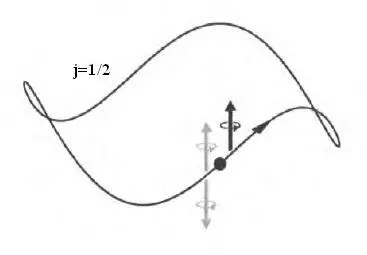
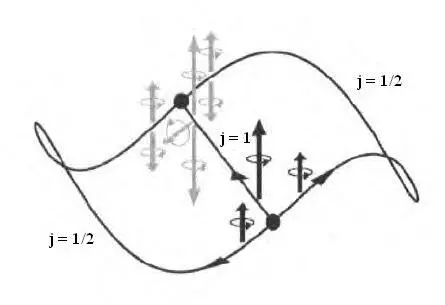
Спиновые сети представляют собой обобщение этой идеи, но сравнение производится более сложным образом. Каждому ребру спиновой сети приписывают значение спина j . Можно представить себе параллельный перенос частиц вдоль каждого ребра, так что их суммарный спин соответствует j . В каждом узле вычисляется амплитуда, которой выражено различие спиновых состояний на входе и выходе. Произведение амплитуд всех узлов дает общий спин сети, зависящий от геометрии пространства, куда погружены ребра сети.
Общие значения спина на ребрах недостаточно полно описывают спиновое состояние частиц: сохраняется произвол при выборе значений m , компоненты спина вдоль оси Z . Трудность в том, что, если задаться определенным значением этой компоненты (скажем, принять m = j для всех ребер), то для каждого типа геометрии амплитуды будут зависеть от ориентации оси Z . Тем не менее существует простой способ превозмочь эту проблему: если просуммировать амплитуду сети по всем возможным комбинациям значений m , где т пробегает диапазон значений — j…+ j на каждом ребре, получим величину, полностью независимую от выбора ориентации.
С использованием этой суммы спиновая сеть позволяет определить состояние квантовой геометрии, характеризующееся ценным свойством, а именно калибровочной инвариантностью: амплитуда не зависит от способа измерения, но только от геометрии пространства внутри сети.
На моем сайте доступен:
http: //gregegan.customer.netspace.net.au/SCHILD/Spin/Spin.html ,
где для разных геометрийпостроены различные состояния спиновых сетей.
Эффект параллельного переноса вектора по определенному маршруту можно представить в виде карты линий, соединяющих касательные пространства в начальной и конечной точках маршрута. Говорят, что для этого пути наблюдается голономия , выраженная вращением R .Семейство геометрий, для которых вышеуказанный апплет вычисляет эволюцию спиновой сети, характеризуется простым правилом: параллельный перенос по прямой из точки (х 0, у 0, z 0)в точку (x 1,y 1,z 1 )поворачивает вектор вокруг оси а на угол, равный магнитуде a , причем
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Лестница Шильда»
Представляем Вашему вниманию похожие книги на «Лестница Шильда» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


![Грег Иган - Рассказы [компиляция]](/books/419837/greg-igan-rasskazy-kompilyaciya-thumb.webp)
Обсуждение, отзывы о книге «Лестница Шильда» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.