Неизвестно - Prolog
Здесь есть возможность читать онлайн «Неизвестно - Prolog» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Старинная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Prolog
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Prolog: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Prolog»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Prolog — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Prolog», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
спонтанный( S1, S2)
означающего, что возможен спонтанный переход из S1 в S2.
Для автомата, изображенного на рис. 4.3, эти отношения будут такими:
конечное( S3).
переход( S1, а, S1).
переход( S1, а, S2).
переход( S1, b, S1).
переход( S2, b, S3).
переход( S3, b, S4).
спонтанный( S2, S4).
спонтанный( S3, S1).
Представим входные цепочки в виде списков Пролога. Цепочка ааb будет представлена как [а, а, b]. Модель автомата, получив его описание, будет обрабатывать заданную входную цепочку, и решать, допускать ее или нет. По определению, недетерминированный автомат допускает заданную цепочку, если (начав из начального состояния) после ее прочтения он способен оказаться в конечном состоянии. Модель программируется в виде бинарного отношения допускается, которое определяет принятие цепочки из данного состояния. Так
допускается( Состояние, Цепочка)
истинно, если автомат, начав из состояния Состояниекак из начального, допускает цепочку Цепочка. Отношение допускаетсяможно определить при помощи трех предложений. Они соответствуют следующим трем случаям:
(1) Пустая цепочка [ ] допускается из состояния S, если S - конечное состояние.
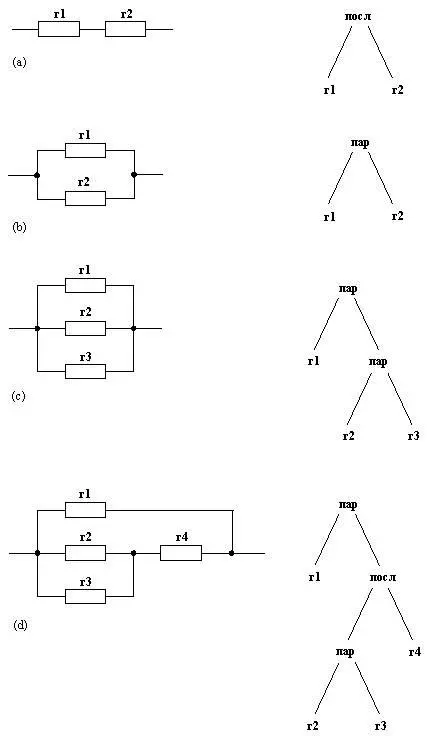
(2) Непустая цепочка допускается из состояния S, если после чтения первого ее символа автомат может перейти в состояние S1, и оставшаяся часть цепочки допускается из S1. Этот случай иллюстрируется на рис. 4.4(а).
(3) Цепочка допускается из состояния S, если автомат может сделать спонтанный переход из S в S1, а затем допустить (всю) входную цепочку из S1. Такой случай иллюстрируется на рис. 4.4(b).
Эти правила можно перевести на Пролог следующим образом:
допускается( S, [ ]) :-
% Допуск пустой цепочки
конечное( S).
допускается( S, [X | Остальные]) :-
% Допуск чтением первого символа
переход( S, X, S1),
допускается( S1, Остальные).
допускается( S, Цепочка) :-
% Допуск выполнением спонтанного перехода
спонтанный( S, S1),
допускается( S1, Цепочка).
Спросить о том, допускается ли цепочка аааb , можно так:
?- допускается( S1, [a, a, a, b]).
yes (да)
Как мы уже видели, программы на Прологе часто оказываются способными решать более общие задачи, чем те, для которых они первоначально предназначались. В нашем случае мы можем спросить модель также о том, в каком состоянии должен находиться автомат в начале работы, чтобы он допустил цепочку аb :
?- допускается( S, [a, b]).
S = s1;
S = s3
Как ни странно, мы можем спросить также "Каковы все цепочки длины 3, допустимые из состояния s1?"
?- допускается( s1, [XI, Х2, X3]).
X1 = а
Х2 = а
Х3 = b;
X1 = b
Х2 = а
Х3 = b;
nо (нет)
Если мы предпочитаем, чтобы допустимые цепочки выдавались в виде списков, тогда наш вопрос следует сформулировать так:
?- Цепочка = [ _, _, _ ], допускается( s1, Цепочка).
Цепочка = [а, а, b];
Цепочка = [b, а, b];
nо (нет)
Можно проделать и еще некоторые эксперименты, например спросить: "Из какого состояния автомат допустит цепочку длиной 7?"
Эксперименты могут включать в себя переделки структуры автомата, вносящие изменения в отношения конечное, переходи спонтанный. В автомате, изображенном на рис. 4.3, отсутствуют циклические "спонтанные пути" (пути, состоящие только из спонтанных переходов). Если на рис. 4.3 добавить новый переход
спонтанный( s1, s3)
то получится "спонтанный цикл". Теперь наша модель может столкнуться с неприятностями. Например, вопрос
?- допускается( s1, [а]).
приведет к тому, что модель будет бесконечно переходить в состояние s1, все время надеясь отыскать какой-либо путь в конечное состояние.
Упражнения
4. 4. Почему не могло возникнуть зацикливание модели исходного автомата на рис. 4.3, когда в его графе переходов не было "спонтанного цикла"?
Посмотреть ответ
4. 5. Зацикливание при вычислении допускаетсяможно предотвратить, например, таким способом: подсчитывать число переходов, сделанных к настоящему моменту. При этом модель должна будет искать пути только некоторой ограниченной длины. Модифицируйте так отношение допускается. Указание: добавьте третий аргумент - максимально допустимое число переходов:
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Prolog»
Представляем Вашему вниманию похожие книги на «Prolog» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

Обсуждение, отзывы о книге «Prolog» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.