Неизвестно - Prolog
Здесь есть возможность читать онлайн «Неизвестно - Prolog» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Старинная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Prolog
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Prolog: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Prolog»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Prolog — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Prolog», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Наконец, несколько замечаний относительно новой версии процедуры ответпольз. Она будет проще, чем процедура рис. 14.11, так как в запросах, передаваемых пользователю, уже не будет переменных. На этот раз пользователь в качестве ответа введет некоторую вероятность (вместо "да" или "нет"). Если пользователю ничего неизвестно о событии, содержащемся в вопросе, то вероятность этого события не изменится. Пользователь может также задать вопрос "почему" и получить изображение объекта Трассав качестве объяснения. Кроме того, следует разрешить пользователю задавать вопрос: "Какова текущая вероятность моей гипотезы?" Тогда, если он устал вводить новую информацию (или у него мало времени), он может прекратить консультационный сеанс, довольствуясь ответом системы, полученным на основании неполной информации.
% Процедура
% рассмотреть( Цель, Трасса, Ответ)
%
% находит степень правдоподобия утверждения "цель это правда".
% Оценка правдоподобия содержится в объекте Ответ. Трасса - это
% цепочка целей-предшественников и правил, которую можно
% использовать в объяснении типа "почему"
рассмотреть( Цель, Трасса, ( Цель: Вер) было
'выведено по' ПравОтв) :-
bagof( Прав: если Условие то Цель с Сила, Правила),
% Все правила, относящиеся к цели
априори( Цель, Вер0),
% Априорная вероятность цели
модиф( Вер0, Правила, Трасса, Вер, ПравОтв).
% Модифицировать априорные вероятности
рассмотреть( Цель1 и Цель2, Трасса,
( Цель1 и Цель2 : Вер было 'выведено из'
( Ответ1 и Ответ2) ) :-
!,
рассмотреть( Цель1, Трасса, Ответ1),
рассмотреть( Цель2, Трасса, Ответ2),
вероятность( Ответ1, В1),
вероятность( Ответ2, В2),
мин( В1, В2, Вер).
рассмотреть( Цель1 или Цель2, Трасса,
( Цель или Цель2:Вер) было 'выведено из'
( Ответ1 и Ответ2) ) :-
!,
рассмотреть( Цель1, Трасса, Ответ1),
рассмотреть( Цель2, Трасса, Ответ2),
вероятность( Ответ1, В1),
вероятность( Ответ2, В2),
макс( В1, В2, Вер).
рассмотреть( не Цель, Трасса,
( не Цель:Вер) было 'выведено из' Ответ) :-
!,
рассмотреть( Цель, Трасса, Ответ),
вероятность( Ответ, В),
обратить( В, Вер).
рассмотреть( Цель, Трасса, ( Цель: Вер) было сказано) :-
ответпольз( Цель, Трасса, Вер).
% Ответ, выведенный пользователем
% Отношение
%
% модиф( Вер0, Правила, Трасса, Вер, ПравОтв)
%
% Существует Цель с априорной вероятностью Вер0. Правила имеют
% отношение к утверждению Цель; суммарное влияние этих правил
% (точнее, их условных частей) на Вер0 приводит к тому,
% что Вер0 заменяется на апостериорную вероятность Вер;
% Трасса - список целей-предков и правил, использовавшихся
% при выводе утверждения Цель;
% ПравОтв - результаты анализа условных частей
% правил из списка Правила.
модиф( Вер0, [ ], Трасса, Вер0, [ ]).
% Нет правил - нет модификации
модиф( Вер0,
[ Прав : если Усл то Цель с Сила | Правила],
Трасса, Вер, [Прав из Ответ | ПравОтв] ):-
рассмотреть( Усл, [Цель по Прав | Трасса], Ответ),
% Условие из первого правила
априори( Усл, В0),
вероятность( Ответ, В),
импликация( В0, В, Сила, Вер0, Вер1),
% "Мягкая" импликация
модиф( Вер1, Правила, Трасса, Вер, ПравОтв).
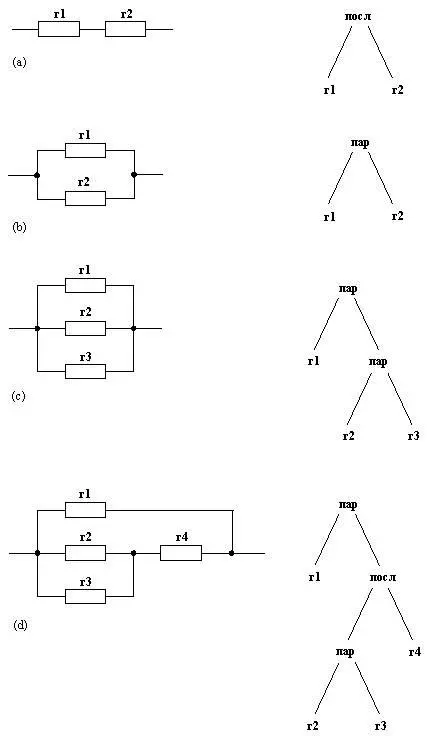
Рис. 14. 16. Определение степени правдоподобия гипотезы при помощи
распространения информации об оценке уверенности по сети вывода.
Назад | Содержание | Вперёд
Назад | Содержание | Вперёд
14. 7. Заключительные замечания
Нашу оболочку экспертной системы можно развивать в целом ряде направлений. В данный момент уместно сделать несколько критических замечаний и высказать предложения по усовершенствованию нашей программы.
В нашей программе, являющейся упрощенной реализацией, не уделено достаточного внимания вопросам эффективности. В более эффективной реализации потребовалось бы использовать более сложные структуры данных, ввести индексирование или иерархическую структуризацию множества правил и т.п.
Наша процедура рассмотретьподвержена зацикливанию в тех случаях, когда в правилах базы знаний "циклически" упоминается одна и та же цель. Этот недостаток легко исправить, предусмотрев в рассмотретьсоответствующий контроль, т. е. проверку, не является ли текущая цель частным случаем некоторой цели, уже введенной в состав объекта Трасса.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Prolog»
Представляем Вашему вниманию похожие книги на «Prolog» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

Обсуждение, отзывы о книге «Prolog» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.