Nicolas Besson - Microsoft Windows Embedded CE 6.0 Exam Preparation Kit
Здесь есть возможность читать онлайн «Nicolas Besson - Microsoft Windows Embedded CE 6.0 Exam Preparation Kit» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Redmond, Год выпуска: 2008, Издательство: Microsoft, Жанр: Руководства, ОС и Сети, Программы, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Microsoft Windows Embedded CE 6.0 Exam Preparation Kit
- Автор:
- Издательство:Microsoft
- Жанр:
- Год:2008
- Город:Redmond
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Microsoft Windows Embedded CE 6.0 Exam Preparation Kit: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Microsoft Windows Embedded CE 6.0 Exam Preparation Kit»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Microsoft Windows Embedded CE 6.0 Exam Preparation Kit — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Microsoft Windows Embedded CE 6.0 Exam Preparation Kit», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Similar to mutexes, multiple processes can open handles of the same semaphore object to access resources shared between processes. The first call to the CreateSemaphore function creates the semaphore object with a specified name. You can also construct unnamed semaphores, but these objects are not available for interprocess synchronization. Subsequent calls to the CreateSemaphore function with the same semaphore name do not create new objects, but open a new handle of the same semaphore.
Table 3-13 lists the most important functions that work with semaphore objects for thread synchronization purposes.
Table 3-13 Semaphore API
| Function | Description |
|---|---|
| CreateSemaphore | Creates and initializes a named or unnamed semaphore object with a counter value. Use named semaphore objects to protect resources shared between processes. |
| CloseHandle | Closes a semaphore handle and deletes the reference to the semaphore object. All references to the semaphore must be closed individually before the kernel deletes the semaphore object. |
| WaitForSingleObject | Waits to be granted ownership of a single semaphore object. |
| WaitForMultipleObjects | Waits to be granted ownership for a single or multiple semaphore objects. |
| ReleaseSemaphore | Releases a semaphore object. |
Events
The Event object is another kernel object that synchronizes threads. This object enables applications to signal other threads when a task is finished or when data is available to potential readers. Each event has signaled/non-signaled state information used by the API to identify the state of the event. Two types of events, manual events and auto-reset events, are created according to the behavior expected by the event.
The creating thread specifies a name for the event object at creation time, although it is also possible to create an unnamed event. It is possible for threads in other processes to call CreateMutex and specify the same name, but these subsequent calls do not create new kernel objects.
Table 3-14 lists the most important functions for event objects for thread synchronization purposes.
Table 3-14 Event API
| Function | Description |
|---|---|
| CreateEvent | Creates and initializes a named or unnamed event object. |
| SetEvent | Signal an event (see below). |
| PulseEvent | Pulse and signal the event (see below). |
| ResetEvent | Reset a signaled event. |
| WaitForSingleObject | Waits for an event to be signaled. |
| WaitForMultipleObjects | Waits to be signaled by a single or multiple event objects. |
| CloseHandle | Releases an Event object. |
The behavior of the events API is different according to the type of events. When you use SetEvent on a manual event object, the event will stay signaled until ResetEvent is explicitly called. Auto-reset events only stay signaled until a single waiting thread is released. At most, one waiting thread is released when using the PulseEvent function on auto-reset events before it immediately transitions back to the non-signaled state. In the case of manual threads, all waiting threads are released and immediately transition back to a non-signaled state.
Interlocked Functions
In multithread environments, threads can be interrupted at any time and resumed later by the scheduler. Portions of code or applications resources can be protected using semaphores, events, or critical sections. In some applications, it could be too time consuming to use those kinds of system objects to protect only one line of code like this:
// Increment variable
dwMyVariable = dwMyVariable + 1;
The sample source code above in C is one single instruction, but in assembly it could be more than that. In this particular example, the thread can be suspended in the middle of the operation and resumed later, but errors can potentially be encountered in the case of another thread using the same variable. The operation is not atomic. Fortunately, it is possible in Windows Embedded CE 6.0 R2 to increment, decrement, and add values in multithreading-safe, atomic operations without using synchronization objects. This is done by using interlocked functions.
Table 3-15 lists the most important interlocked functions that are used to atomically manipulate variables.
Table 3-15 Interlock API
| Function | Description |
|---|---|
| InterlockedIncrement | Increment the value of a 32 bit variable. |
| InterlockedDecrement | Decrement the value of a 32 bit variable. |
| InterlockedExchangeAdd | Perform atomic addition on a value. |
Troubleshooting Thread Synchronization Issues
Multithreaded programming enables you to structure your software solutions based on separate code execution units for user interface interaction and background tasks. It is an advanced development technique that requires careful implementation of thread synchronization mechanisms. Deadlocks can happen, especially when using multiple synchronization objects in loops and subroutines. For example, thread One owns mutex A and waits for mutex B before releasing A, while thread Two waits for mutex A before releasing mutex B. Neither thread can continue in this situation because each depends on a resource being released by the other. These situations are hard to locate and troubleshoot, particularly when threads from multiple processes are accessing shared resources. The Remote Kernel Tracker tool identifies how threads are scheduled on the system and enables you to locate deadlocks.
The Remote Kernel Tracker tool enables you to monitor all processes, threads, thread interactions, and other system activities on a target device. This tool relies on the CeLog event-tracking system to log kernel and other system events in a file named Celog.clg in the %_FLATRELEASEDIR% directory. System events are classified by zone. The CeLog event-tracking system can be configured to focus on a specific zone for data logging.
If you have Kernel Independent Transport Layer (KITL) enabled on the target device, the Remote Kernel Tracker visualizes the CeLog data and analyzes the interactions between threads and processes. This is illustrated in Figure 3-4. While KITL sends the data directly to the Remote Kernel Tracker tool, it is also possible to analyze collected data offline.
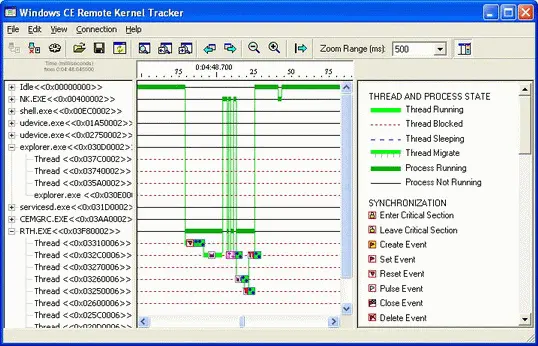
Figure 3-4The Remote Kernel Tracker tool
For more information about CeLog event tracking and CeLog event filtering, see the section "CeLog Event Tracking Overview" in the Windows Embedded CE 6.0 documentation available on the Microsoft MSDN website at http://msdn2.microsoft.com/en-us/library/aa935693.aspx .
Lesson Summary
Windows Embedded CE is a multithreaded operating system that provides several process management functions to create processes and threads, assign thread priorities ranging from zero through 255, suspend threads, and resume threads. The Sleep function is useful in suspending a thread for a specified period of time, but the WaitForSingleObject or WaitForMultipleObjects functions can also be used to suspend a thread until another thread or a synchronization object is signaled. Processes and threads are ended in two ways: with and without cleanup. As a general rule, always use ExitProcess and ExitThread to give the system a chance to perform cleanup. Use TerminateProcess and TerminateThread only if you have absolutely no other choice.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Microsoft Windows Embedded CE 6.0 Exam Preparation Kit»
Представляем Вашему вниманию похожие книги на «Microsoft Windows Embedded CE 6.0 Exam Preparation Kit» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Microsoft Windows Embedded CE 6.0 Exam Preparation Kit» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.