Министерство обороны СССР - Носимый противотанковый комплекс 9К115. Техническое описание 9К115.00.000 ТО
Здесь есть возможность читать онлайн «Министерство обороны СССР - Носимый противотанковый комплекс 9К115. Техническое описание 9К115.00.000 ТО» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1985, Издательство: Военное издательство, Жанр: Прочая справочная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Носимый противотанковый комплекс 9К115. Техническое описание 9К115.00.000 ТО
- Автор:
- Издательство:Военное издательство
- Жанр:
- Год:1985
- Город:Москва
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Носимый противотанковый комплекс 9К115. Техническое описание 9К115.00.000 ТО: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Носимый противотанковый комплекс 9К115. Техническое описание 9К115.00.000 ТО»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Носимый противотанковый комплекс 9К115. Техническое описание 9К115.00.000 ТО — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Носимый противотанковый комплекс 9К115. Техническое описание 9К115.00.000 ТО», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
6.2. Пусковое устройство 9П151
6.2.1. Пусковое устройство 9П151 предназначено для установки, закрепления и разворота на цель снаряда 9М115, производства пуска и управления полетом снаряда до поражения цели.
6.2.2. Основанием ПУ является станок 9П152, состоявший из треножного основания, поворотного и подъемного механизмов. Станок служит для закрепления аппаратурного блока 9С817, на котором в свою очередь закреплен прибор наведения 9С816, механизм пуска и механизм фиксации. Тренога ПУ состоит из трех ног: передней 16 (рис. 17), правой 15 и левой 13, обеспечивающих устойчивость ПУ на любом грунте и позволяющих горизонтировать его. Горизонтирование ПУ осуществляется поворотом передней ноги в вертикальной плоскости на нужный угол, Освобождение и фиксация ноги производится поворотом рукоятки 14. Конструкция треножного основания обеспечивает быстрый перевод ПУ в положение для стрельбы с треноги, возможность стрельбы с упора, компактность в походном (сложенном) положении ПУ во вьюке за спиной.
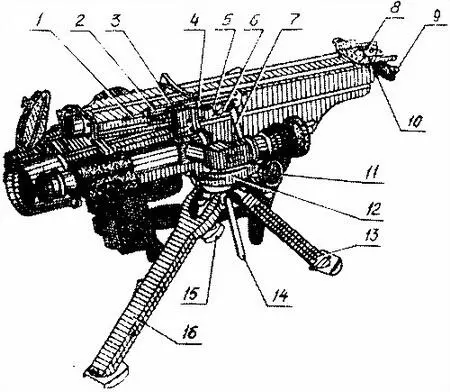
Рис. 17. Пусковое устройство 9П151:
1 — ударник 9П151.01,009; 2 — основание 9П151.01.010; 3 — пружина 9П151.01.012; 4 — механизм пуска 9П151.01.000; 5 — рычаг 9П151.01.030; 6 — флажок 9П151.01.005; 7 — крючок 9П151.01.020; 8 — ползун 9Г1151.00.002; 9 — рычаг 9П151.00.006; 10 — механизм фиксации 9П151.00.010; 11 — маховик 9П152.02.020; 12 — механизм подъемных 911152.02.000; 13 — нога левая 9П152.00.030; 14 — рукоятка 9П152,00.070; 15 — нога правая 9П152.00.050; 16 — нога передняя 9П152.00.010.
Поворотный и подъемный механизмы шарнирно соединены с треножным основанием, что позволяет осуществлять разворот закрепленного на станке аппаратурного блока с прибором наведения 9С816 и снаряда 9М115 в горизонтальной и вертикальной плоскостях.
Подъемный механизм 12 служит для придания углов возвышения и склонения прибору 9С816 и снаряду 9М115 при развороте на цель и слежении за целью после пуска.
На винте подъемного механизма нанесена кольцевая риска. Положение ПУ, при котором кольцевая риска совмещена с торцем крышки подъемного механизма, является начальным для отсчета углов возвышения и склонения.
Подъемный механизм представляет собой винтовую пару, приводимую в движение вращением маховика 11 через пару конических шестерен. Поворотный механизм 7 (см. рис. 2) служит для разворота прибора наведения и снаряда 9М115 на цель в горизонтальной плоскости.
Поворотный механизм представляет собой односкоростной редуктор с червячной парой и инерционным механизмом, обеспечивающим плавность наведения по азимуту. Он приводится в движение вращением маховика 8, на котором для удобства работы имеется рукоятка 9.
На корпусе аппаратурного блока и на передней ноге имеются антабки для закрепления вьючного устройства 10.
6.2.3. Механизм пуска 4 (см, рис. 17) предназначен для разбития капсюля батареи Т-457 и представляет собой механизм ударного типа, приводимый в действие пружиной.
Механизм пуска состоит из ударного, спускового и предохранительного механизмов, смонтированных на одном основании 2. На механизме пуска закреплен флажок 6, занимающий два фиксированных положения ПОХОД. и БОЕВ. Постановка механизма пуска на боевой взвод (взведение пружины 3 спускового механизма) осуществляется вручную отведением рычага 5 назад до отказа, при этом флажок должен находиться в положении БОЕВ. Для того, чтобы механизм пуска сработал, необходимо нажать на спусковой крючок 7. При этом ударник 1 ударного механизма под действием пружины обеспечивает разбитие капсюля батареи Т-457.
Механизм пуска крепится к корпусу аппаратурного блока винтами.
6.2.4. Механизм фиксации 10 обеспечивает закрепление па ПУ снаряда 9М115. Он собран на кронштейне и закреплен на аппаратурном блоке 9С817 сзади.
Механизм фиксации представляет собой кулачковый механизм с поступательно перемещающимся ползуном 8. На ползуне имеются выступы, которые входят в зацепление с зацепом контейнера снаряда. При повороте рычага 9 механизма фиксации вместе с ним поворачивается кулачок, вызывая смещение ползуна. Выступы ползуна, действуя на зацеп контейнера, фиксируют его (или расфиксируют) в зависимости от направления поворота рычага.
6.2.5. Наземная аппаратура управления предназначена для визуального обнаружения цели и последующего слежения за ней, обеспечения подготовки и производства пуска снаряда, автоматического определения координат летящего снаряда относительно линии визирования, формирования команд управления и выдачи их в двухпроводную линию связи. НАУ определяет не только положение снаряда относительно линии визирования, но и его текущий угол крена и вырабатывает соответствующие команды управления. Кроме того, НАУ преобразует эти команды из неподвижной системы координат, связанной с НАУ, в подвижную систему координат снаряда.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Носимый противотанковый комплекс 9К115. Техническое описание 9К115.00.000 ТО»
Представляем Вашему вниманию похожие книги на «Носимый противотанковый комплекс 9К115. Техническое описание 9К115.00.000 ТО» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Носимый противотанковый комплекс 9К115. Техническое описание 9К115.00.000 ТО» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.