Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века
Здесь есть возможность читать онлайн «Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2013, ISBN: 2013, Издательство: Министерство образования и науки Российской Федерации Санкт-Петербургский государственный морской технический университет, Жанр: military_weapon, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века
- Автор:
- Издательство:Министерство образования и науки Российской Федерации Санкт-Петербургский государственный морской технический университет
- Жанр:
- Год:2013
- Город:Санкт-Петербург
- ISBN:978-5-94652-418-9
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Для специалистов, работающих в области подводных специализированных комплексов и аппаратов, руководителей разных уровней ВМФ России, студентов и аспирантов профильных технических вузов, а также курсантов и адъюнктов военных училищ и академий.
Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Согласно предлагаемой концепции (которую некоторые зарубежные источники характеризуют как «футуристическую»), НПА будет способен решать следующие задачи:
— обнаружение и уничтожение ПЛ, мин и других подводных целей с применением тяжелых и легких торпед, неуправляемых ракет, а в перспективе и высокоскоростных (суперкавитирующих) боеприпасов;
— ведение гидроакустической, радиотехнической и оптоэлектронной разведки;
— установка быстро развертываемых позиционных, мобильных и дрейфующих линейных антенн, низкочастотных гидроакустических излучателей, необслуживаемых подводных датчиков длительного действия и др., а также прибрежных систем обнаружения подводных лодок;
— осуществление широкополосной цифровой звукоподводной связи, управление распределенной сетью датчиков, ретрансляция данных от выдвинутых к побережью систем разведки и обнаружения подводных лодок на корабельные и береговые командные центры и центры тактической поддержки;
— развертывание малогабаритных автономных НПА для решения обеспечивающих и специальных задач;
— сбор гидрологических и океанографических данных, картографирование морского дна в интересах боевого обеспечения действий ПЛ и сил флота.
Определены две концепции создания НПА «Manta». Первая, получившая наименование «Proud conformal», предусматривает постройку НПА длиной 15 м, оснащенного двумя маршевыми движителями, четырьмя подруливающими устройствами, а также бортовым оборудованием управления и энергообеспечения. НПА данного типа будет способен нести полезную нагрузку (разведывательно-ударный модуль) массой до 8 т. В его состав войдут средства гидроакустической, радиотехнической и оптоэлектронной разведки, шесть-восемь малогабаритных, две легкие и две тяжелые торпеды, а также пусковая установка с восемью направляющими для неуправляемых 155 мм ракет.
Вторая концепция, названная «Integrated conformal» (получила также обозначение «Super Manta»), рассматривает возможность создания НПА длиной 25 м. и водоизмещением 90 т., способного нести функциональную полезную нагрузку массой до 14 т. (рис. 20).
Для подтверждения реализуемости концепции, отработки и интеграции необходимых технологий уже создана демонстрационно-экспериментальная модель аппарата, получившая обозначение MTV (Manta Test Vehicle). Ее масса 7,5 т, длина 11 м. Прочный корпус модели собран из трех цилиндрических секций диаметром 533 мм. Средняя (самая длинная) секция состоит из двух частей. В носовой секции размещается полезная нагрузка, в кормовой — аккумуляторная батарея, обеспечивающая работу всех систем, аппаратура управления, электродвигатель постоянного тока и движитель насосного типа. В состав навигационного комплекса входят инерциальная навигационная система, доплеровская ГАС и приемник NAVSTAR. Балластные цистерны выполнены в виде сфер, закрепленных на оконечностях боковых секций, в которых размещена аккумуляторная батарея, обеспечивающая ход модели со скоростью 5 уз в течение 13 ч. Наибольшая скорость MTV — 10 уз. Легкий корпус выполнен из стеклопластика.

Рис. 20. Внешний вид НПА «Manta» в представлении художника. На внешней поверхности аппарата видны ниши для выпуска оружия разных калибров.
Возможные области применения НПА «Manta» нашли свое отражение в Плане развития необитаемых подводных аппаратов, впервые изданном в США 20 апреля 2000 года (рис. 21) [18].
В качестве гибридного необитаемого аппарата, который можно отнести как к подводному, так и надводному классу, можно привести аппарат, получивший наименование ACTUV (Anti-submarine warfare Continuous Trail Unmanned Vessel), что можно перевести как «Противолодочное необитаемое судно непрерывного слежения» [19].
Общий предполагаемый облик аппарата (по состоянию на 2010 год) представлен на рис. 22. В дальнейшем, концепция построения корпуса ННА претерпела изменения, однако общий состав оборудования и назначение остались прежними.
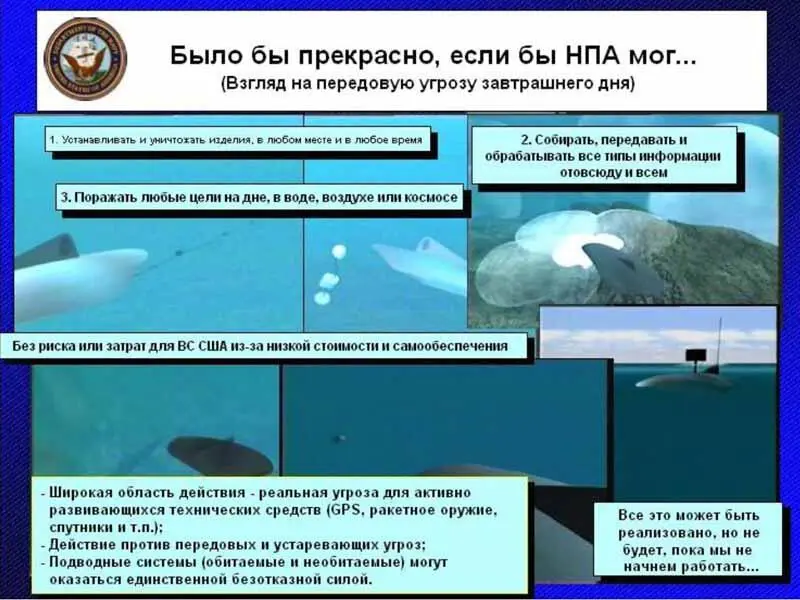
Рис. 21. План использования перспективных подводных аппаратов в ВМС США.
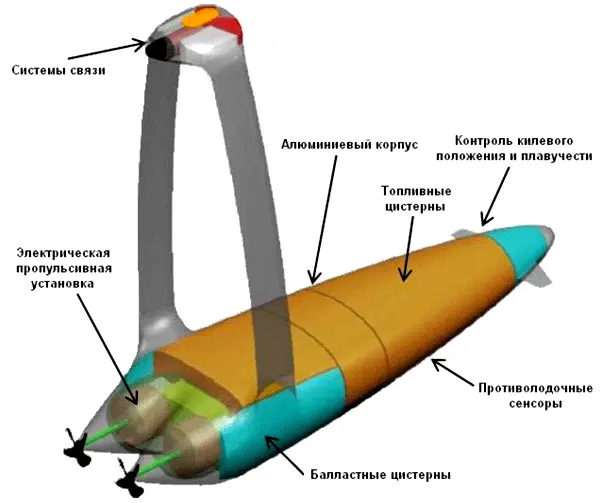
Рис. 22. Общая схема ННА ACTUV.
Общий вес аппарата составит около 157 т. Длина корпуса составит примерно 19 м., при этом корпус судна в рабочем состоянии будет практически полностью погружен под воду, а над поверхностью воды останется только небольшая часть (арка), внутри которой будут расположены системы связи с оператором. Планируется, что судно будет развивать максимальную скорость до 35 узлов при автономности 30 суток.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века»
Представляем Вашему вниманию похожие книги на «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Макс Глебов - Асимметричный ответ [СИ litres]](/books/397832/maks-glebov-asimmetrichnyj-otvet-si-litres-thumb.webp)


Обсуждение, отзывы о книге «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.