Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века
Здесь есть возможность читать онлайн «Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2013, ISBN: 2013, Издательство: Министерство образования и науки Российской Федерации Санкт-Петербургский государственный морской технический университет, Жанр: military_weapon, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века
- Автор:
- Издательство:Министерство образования и науки Российской Федерации Санкт-Петербургский государственный морской технический университет
- Жанр:
- Год:2013
- Город:Санкт-Петербург
- ISBN:978-5-94652-418-9
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Для специалистов, работающих в области подводных специализированных комплексов и аппаратов, руководителей разных уровней ВМФ России, студентов и аспирантов профильных технических вузов, а также курсантов и адъюнктов военных училищ и академий.
Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
В целом, сетецентрический подход к организации обмена информацией между датчиками, аппаратами и носителями подразумевает наличие трех слоев: информационного, сенсорного и исполнительного (рис. 8) [10].
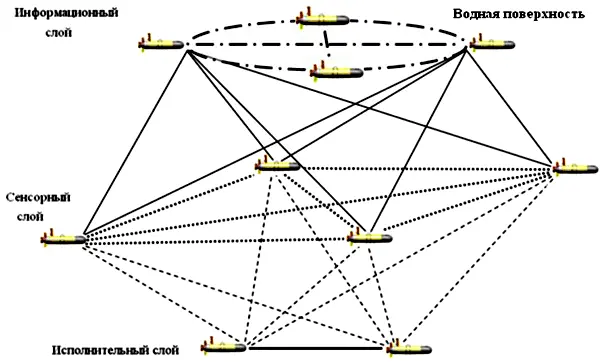
Рис. 8. Модель сетецентрической структуры группы НПА.
При этом, информационный слой может состоять из всплывающих на поверхность необитаемых подводных аппаратов, надводных роботизированных аппаратов, беспилотных летательных аппаратов, буев или надводных кораблей обеспечения в различных сочетаниях. Сенсорный слой формируется группой НПА, оснащенных аппаратурой освещения и анализа обстановки, а также многоканальными средствами связи и навигации. В свою очередь, аппараты, составляющие исполнительный слой, выполняют конкретные поставленные перед группой НПА задачи (например, физическое уничтожение обнаруженных мин).
В качестве иллюстрации взаимодействия подобной единой системы, разрабатываемой в рамках реализации концепции FORCEnet, можно привести схему (рис. 9) организации испытаний сети «Морская паутина» (англ. Seaweb network). Данные испытания проводились в рамках учений в Мексиканском заливе с 1 по 8 февраля 2003 года.
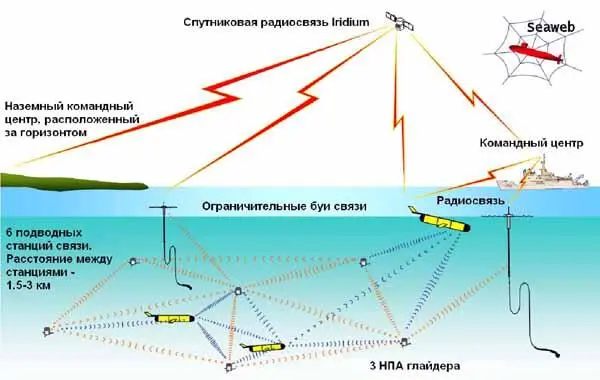
Рис. 9. Схема взаимодействия элементов «Морской паутины» [11].
Особенно активное применение развертываемых необслуживаемых датчиков, взаимодействующих с необитаемыми морскими аппаратами, предполагается в сфере борьбы с подводными лодками противника в прибрежных водах США и их стран-союзников. Это связано с тем, что такие системы позволяют обеспечить ударные противолодочные силы гораздо более точным целеуказанием, чем это было раньше.
Для иллюстрации последних разработок американских специалистов в указанном направлении можно привести комплекс DADS.
Развертываемая автономная протяженная система (англ. Deployable Autonomous Distributed System — DADS) — это акустический комплекс быстрого реагирования рубежного типа, оперативно разворачиваемый для защиты гаваней, заливов или бухт дислокации подводных лодок в любой прибрежной акватории. Концепция построения этого комплекса приведена на рис. 10.

Рис. 10. Концепция построения комплекса DADS [12].
Базовую основу DADS составляют:
— сеть донных акустических станций с вертикальной и горизонтальной приемными антеннами и гидроакустическими модемами;
— сеть автономных донных станций с акустическими и неакустическими средствами обнаружения (в том числе и для дальнего обнаружения подводных лодок);
— комплект заякоренных гидролокаторов направленной подсветки (с остронаправленными излучателями подсветки) для создания рубежей наблюдений;
— один или несколько необитаемых подводных аппаратов, играющих роль точек доступа (для средств радио- и гидроакустической связи). Количество НПА в комплексе определяется протяженностью рубежа наблюдений.
Передача информации в сети донных станций может также осуществляться с использованием средств подводной сети гидроакустической связи, применяемых в системе Seaweb, упоминавшейся ранее. Предполагается, что уничтожение цели (подводной лодки) будет осуществляться с использованием вертолетов или самолетов с авиационными противолодочными минами или торпедами.
По мнению американских специалистов, создание подобных систем позволит вести продолжительное наблюдение за подводной обстановкой, своевременно обнаруживать и распознавать подводные цели на обширной акватории, а ее оперативное развертывание будет обеспечивать эффективное решение целого ряда важных стратегических задач.
Кроме того, необходимо отдельно отметить, что существующие в США далеко продуманные перспективы развития необитаемых подводных аппаратов предполагают их стремительную интеллектуализацию, которая приведет к возникновению действительно опасного класса устройств, которые смогут самостоятельно производить поиск подводных и надводных объектов противника, идентифицировать их и уничтожать, при этом оставаясь практически незаметными для самого противника (рис. 11).
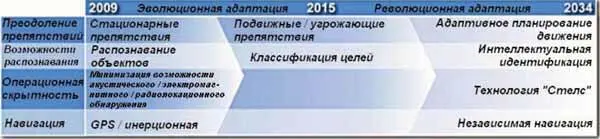
Рис. 11. План развития морских роботизированных систем до 2034 года [13].
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века»
Представляем Вашему вниманию похожие книги на «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Макс Глебов - Асимметричный ответ [СИ litres]](/books/397832/maks-glebov-asimmetrichnyj-otvet-si-litres-thumb.webp)


Обсуждение, отзывы о книге «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.