Andrei M. Shkel - Pedestrian Inertial Navigation with Self-Contained Aiding
Здесь есть возможность читать онлайн «Andrei M. Shkel - Pedestrian Inertial Navigation with Self-Contained Aiding» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Pedestrian Inertial Navigation with Self-Contained Aiding
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Pedestrian Inertial Navigation with Self-Contained Aiding: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Pedestrian Inertial Navigation with Self-Contained Aiding»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
A thorough introduction to the general concept of navigation as well as major navigation and aiding techniques An exploration of inertial navigation implementation, Inertial Measurement Units, and strapdown inertial navigation A discussion of error analysis in strapdown inertial navigation, as well as the motivation of aiding techniques for pedestrian inertial navigation A treatment of the zero-velocity update (ZUPT) aided inertial navigation algorithm, including its mechanization, implementation, error analysis, and adaptivity Perfect for students and researchers in the field who seek a broad understanding of the subject,
will also earn a place in the libraries of industrial researchers and industrial marketing analysts who need a self-contained summary of the foundational elements of the field.
Pedestrian Inertial Navigation with Self-Contained Aiding — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Pedestrian Inertial Navigation with Self-Contained Aiding», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
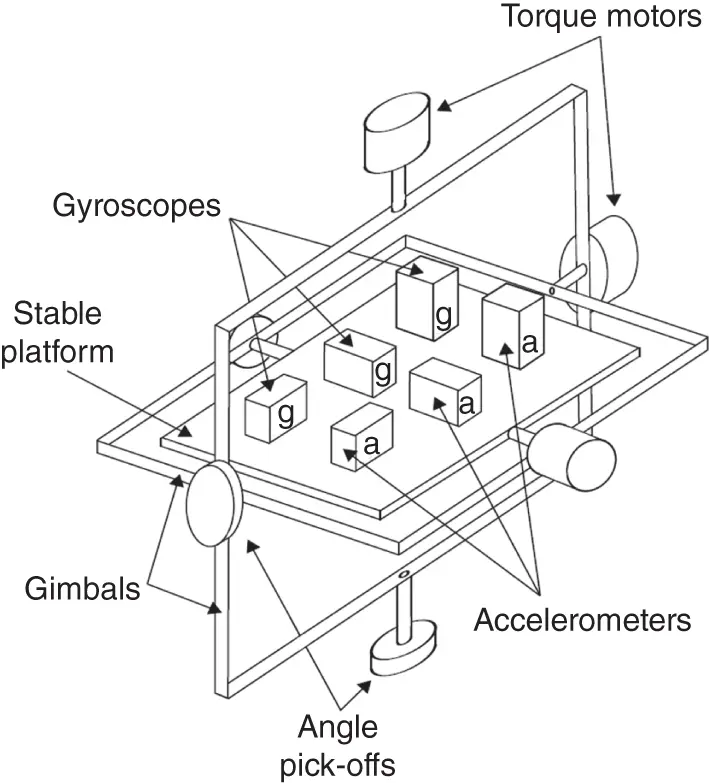
Figure 1.1 A schematic of gimbal system.
Source: Woodman [5]
.
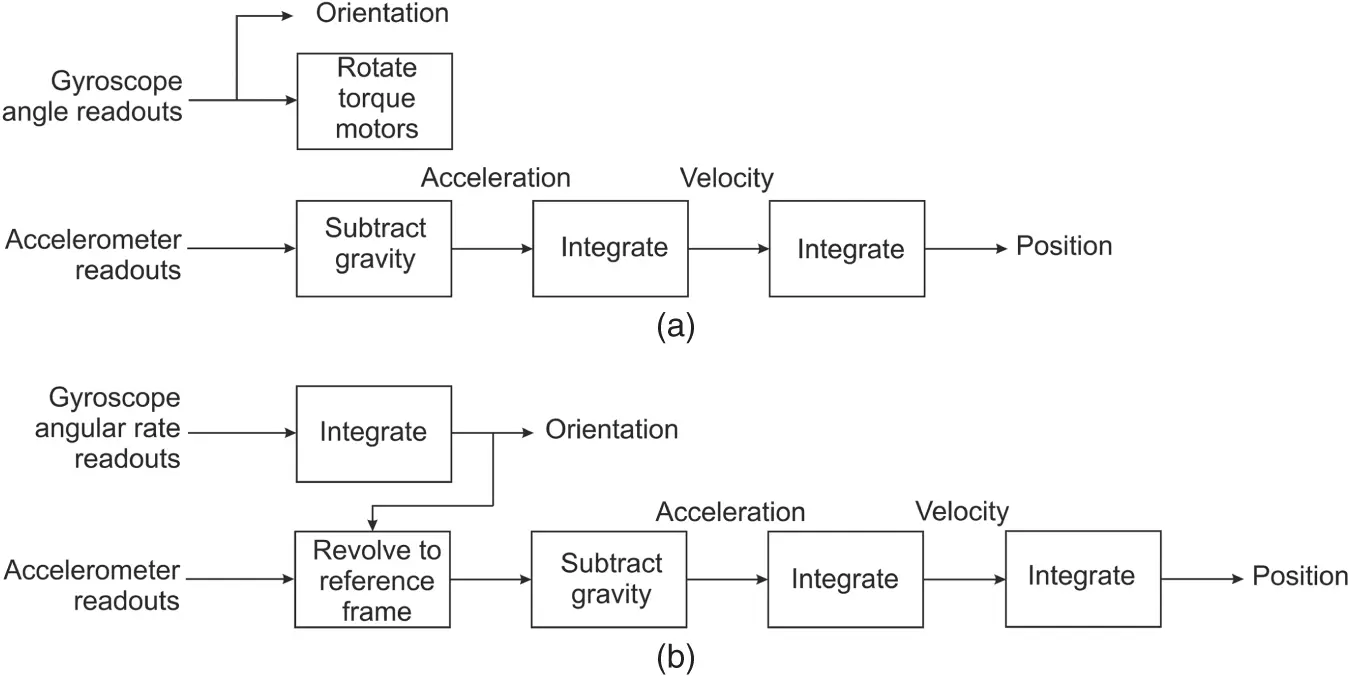
Figure 1.2 Comparison of (a) gimbal inertial navigation algorithm and (b) strapdown inertial navigation algorithm.
Inertial navigation, as a dead reckoning approach to navigation, also suffers from error accumulations. In the inertial navigation algorithm, not only accelerations and angular rates are integrated but all the measurement noises are also integrated and accumulated. As a result, unlike the position fixing type of navigation, the navigation accuracy deteriorates as navigation time increases. Noise sources include fabrication imperfections of individual inertial sensors, assembly errors of the entire IMU, electronic noises, environment‐related errors (temperature, shock, vibration, etc.), and numerical errors. Thus, inertial navigation imposes challenging demands on the system, in terms of the level of errors, to achieve long‐term navigation. This partially explains why inertial navigation systems were developed around 100 years later than the development of inertial sensors. It has been shown that without an error‐suppressing algorithm, the position error accumulates without bound and approximately proportional to time cubed. For example, for navigation grade IMUs, which cost a few hundred thousand dollars per axis, the navigation error will reach about one nautical mile after an hour of navigation, or equivalently less than 0.01 m of navigation error within a minute of navigation. However, for consumer grade IMUs, which cost a few dollars, the navigation error will exceed a meter of error within a few seconds of navigation [9]. Therefore, aiding techniques are necessary to limit the navigation error propagation in inertial navigation, especially in the case of pedestrian inertial navigation, where the cost and size of the system are limited.
1.3 Pedestrian Inertial Navigation
Pedestrian navigation has been of great interest in recent years for path finding, personal security, health monitoring, and localizers for first responder systems. Due to the complicated environment in which a person may need to navigate, self‐contained navigation techniques are fundamental for pedestrian navigation. An example of the self‐contained navigation technique is inertial‐only navigation of pedestrians, which became recently a popular topic. Most pedestrian navigation systems rely on inertial sensors and inertial navigation techniques in their core, just as any other navigation applications. However, the pedestrian navigation poses much stricter requirements on the size and weight of inertial instruments, or IMUs, due to the limitation of human carrying capacity, and the inertial‐only pedestrian application was technologically not feasible until recently.
Thanks to the development of Micro‐Electro‐Mechanical Systems (MEMS) technology in the past 20 years, MEMS‐based IMUs have become smaller in size and more accurate in performances, and as a result, pedestrian inertial navigation has been made possible [10]. MEMS‐based IMUs with a size on the order of millimeters have become widely available on the market, and they can be installed in portable devices that can be easily carried around, such as mobile phones, smart watches, or devices that are small enough to be carried in a pocket. Figure 1.3compares the IMU that was developed for the Apollo missions 50 years ago and a current commercial MEMS‐based IMU. This is an illustration of technological advances in size, and it should be acknowledged that performances of the two systems are still not the same. Note that a gimbal inertial navigation was implemented for the Apollo mission, instead of the more commonly used strapdown inertial navigation systems in these days. The IMU for the Apollo missions had a volume of 1100  (or
(or 
 ) and a weight of 42.5
) and a weight of 42.5  [11], whereas the volume of the shown MEMS‐bases IMU is 8.55
[11], whereas the volume of the shown MEMS‐bases IMU is 8.55  and the weight is on the order of tens of milligrams. Six orders of magnitude of reduction in both volume and weight has been demonstrated over the past 50 years, though to achieve the matching performance is still an on‐going area of research. Such a great technical advancement in the miniaturization of IMUs started enabling the pedestrian inertial navigation. Along with the size reduction, the performance of inertial sensors is continuously improving. The use of miniaturized sensors in these new applications inspired the development of new algorithms and new approaches for solving the challenges of navigation. These approaches are discussed next.
and the weight is on the order of tens of milligrams. Six orders of magnitude of reduction in both volume and weight has been demonstrated over the past 50 years, though to achieve the matching performance is still an on‐going area of research. Such a great technical advancement in the miniaturization of IMUs started enabling the pedestrian inertial navigation. Along with the size reduction, the performance of inertial sensors is continuously improving. The use of miniaturized sensors in these new applications inspired the development of new algorithms and new approaches for solving the challenges of navigation. These approaches are discussed next.
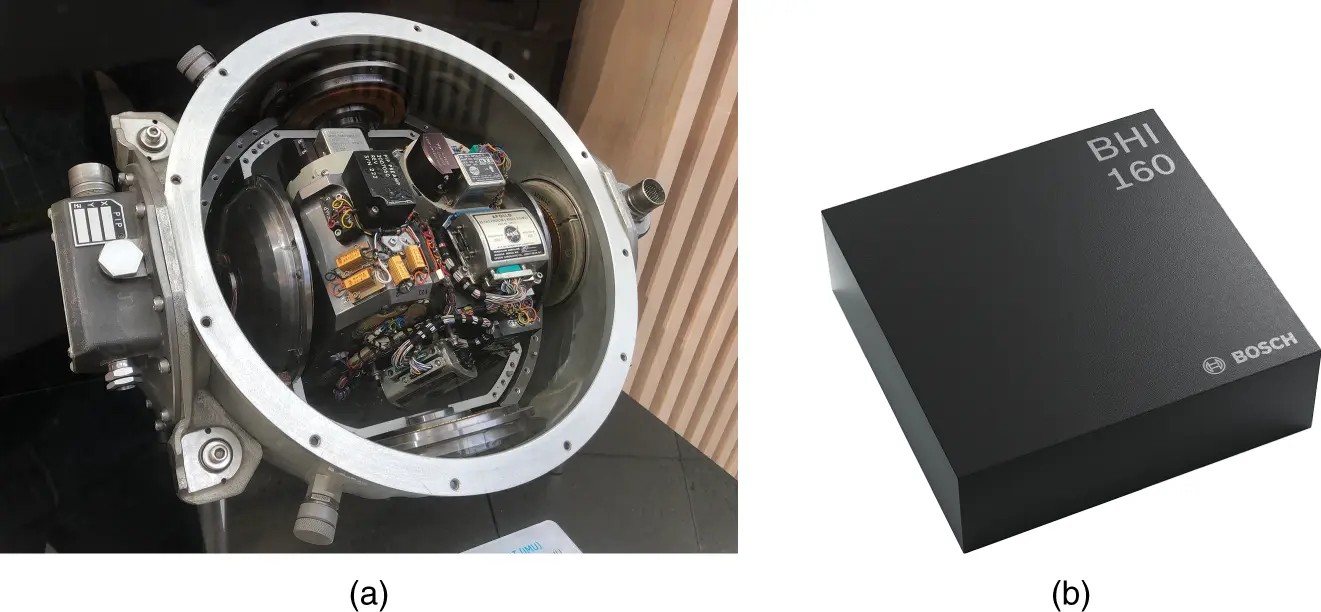
Figure 1.3 A comparison of (a) an IMU developed for the Apollo missions in 1960s.
Source: https://en.wikipedia.org/wiki/Inertial_measurement_unit
and (b) a current commercial MEMS‐based IMU.
Source: https://www.bosch-sensortec.com/products/smart-sensors/bhi160b/
.
1.3.1 Approaches
There are two general approaches in the pedestrian inertial navigation. One is the strapdown inertial navigation as introduced in Section 1.2, where IMU readouts are integrated into position and orientation. This approach is universally applicable, but the integral step makes the algorithm computationally expensive and the navigation error accumulates as time cubed due to the gyroscope bias. In order to limit the error propagation, the most commonly used method is to apply the Zero‐Velocity Updates (ZUPTs) when the velocity of the foot is close to zero (the foot is stationary on the ground) [12]. The stationary state can be used to limit the long‐term velocity and angular rate drift, thus greatly reduce the navigation error. In this implementation, IMU is fixed on the foot to perform the navigation and to detect the stance phase at the same time. Whenever the stance phase is detected, the zero‐velocity information of the foot is fed into the Extended Kalman Filter (EKF) as a pseudo‐measurement to compensate for IMU biases, thus reducing the navigation error growth in the system. In this architecture, not only the navigation errors but also IMU errors can be estimated by the EKF. The limitation of this approach is that the IMU needs to be mounted on the foot.
In order to avoid the integral step in the pedestrian inertial navigation and also relax the requirement of IMU mounting position, a Step‐and‐Heading System (SHS) is an alternative. It is composed of three main parts: step detection, step length estimation, and step heading angle estimation [13]. Unlike the first approach, this approach can only be applied in the pedestrian inertial navigation. In this approach, the step length of each stride is first estimated based on some features of motion obtained from the IMU readouts. Methods based on biomechanical models and statistical regression methods are popular for the estimation. Some commonly used features include the gait frequency, magnitude of angular rate, vertical acceleration, and variance of angular rate. Then, the heading angle is estimated by the gyroscope readout, which is typically mounted at the head. This step can also be aided by magnetometers to improve the accuracy. In this way, the total displacement can be estimated combining the traveled distance and the heading angle. However, two major challenges exist for this approach. First, the gazing direction needs to be aligned with the traveling direction, implying that the subject needs to look at the traveling direction all the time, which is not practical. Second, the step length estimation remains difficult. The average value of the estimated step length may be accurate when median value generally less than 2%, but the estimate precision is generally low, with the Root Mean Square Error (RMSE) about 5% [14]. With a wide adaption of hand‐held and fitness devices, this is currently an active area of research.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Pedestrian Inertial Navigation with Self-Contained Aiding»
Представляем Вашему вниманию похожие книги на «Pedestrian Inertial Navigation with Self-Contained Aiding» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Pedestrian Inertial Navigation with Self-Contained Aiding» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.