Владимир Никонов - Реконструкция обстоятельств ДТП. Введение в современные методы экспертных исследований. Использование краш-тестов
Здесь есть возможность читать онлайн «Владимир Никонов - Реконструкция обстоятельств ДТП. Введение в современные методы экспертных исследований. Использование краш-тестов» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. ISBN: , Издательство: Литагент Ридеро, Жанр: Юриспруденция, Прочая научная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Реконструкция обстоятельств ДТП. Введение в современные методы экспертных исследований. Использование краш-тестов
- Автор:
- Издательство:Литагент Ридеро
- Жанр:
- Год:неизвестен
- ISBN:9785448581755
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Реконструкция обстоятельств ДТП. Введение в современные методы экспертных исследований. Использование краш-тестов: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Реконструкция обстоятельств ДТП. Введение в современные методы экспертных исследований. Использование краш-тестов»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Реконструкция обстоятельств ДТП. Введение в современные методы экспертных исследований. Использование краш-тестов — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Реконструкция обстоятельств ДТП. Введение в современные методы экспертных исследований. Использование краш-тестов», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
В технике, как правило, используется правая система координат. Правая система координат определяется по правилу правой руки, как показано на рис. 1.1.
В трехмерном пространстве углы между всеми осями прямоугольной системы координат всегда равны 90 0. Оси системы координат, как правило, обозначаются следующими друг за другом в алфавите латинскими буквами x , y и z . Правило правой руки заключается в том, что если большой палец обозначен как ось x , то ближайший к нему указательный палец – это ось y , а следующий средний палец – ось z . Если большой палец обозначен другой буквой, то далее следует круговая перестановка в алфавитном порядке x – y – z – x – y – …, как показано на рис. 1.1. При этом направления пальцев всегда соответствуют положительному направлению координатных осей.
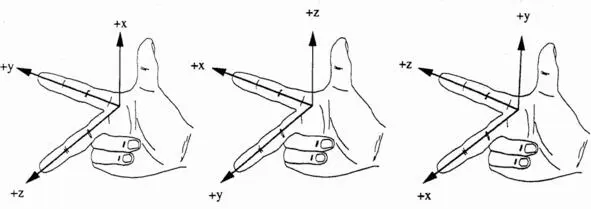
Рис. 1.1. Правило правой руки для осей координат.
Ось координат x еще называется осью абсцисс, ось y – осью ординат, а ось z – осью аппликат.
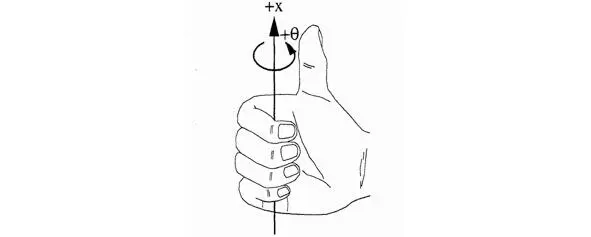
Рис. 1.2. Положительное направление вращения вокруг оси.
Предположим, что мы начинаем поворачивать ось x вокруг точки начала координат. Так вот – правая система координат имеет такое свойство, что, если смотреть на плоскость xy из какой-либо точки положительной полуоси z , то при повороте оси x на 90 0 против часовой стрелки ее положительное направление совпадет с положительным направлением оси y .
Это правило так же хорошо иллюстрируется с помощью правой руки. Если приложить ладонь к некоторой оси так, чтобы большой палец был направлен вдоль положительного направления оси, и согнуть остальные четыре пальца, то направление их движения покажет положительное направление вращения вокруг этой оси координат, как показано на рис. 1.2.
В дальнейшем использование только правых систем координат позволяет формализовать уравнения, содержащие координаты или их производные, и избежать путаницы со знаками.
Система координат автомобиля
В соответствии со стандартом ISO 8855:2011 «Транспорт дорожный. Динамика транспортных средств и курсовая устойчивость. Словарь», ось X – это продольная ось автомобиля, которая всегда направлена вперед. Ось Y – это поперечная ось автомобиля, которая всегда направлена влево от автомобиля.
Тогда, так как система координат правая, то вертикальная ось Z автомобиля направлена вверх. Начало системы координат располагается в центре тяжести автомобиля, чтобы упростить запись уравнений, описывающих его движение. Система координат автомобиля и положительные направления вращения вокруг осей показаны на рис. 1.3.
Преобразование координат в плоскости
Для определения координат автомобиля в плоскости достаточно трех параметров: координат центра тяжести автомобиля и угла его ориентации, которым может быть, например, угол между продольной осью автомобиля и осью X неподвижной системы координат.
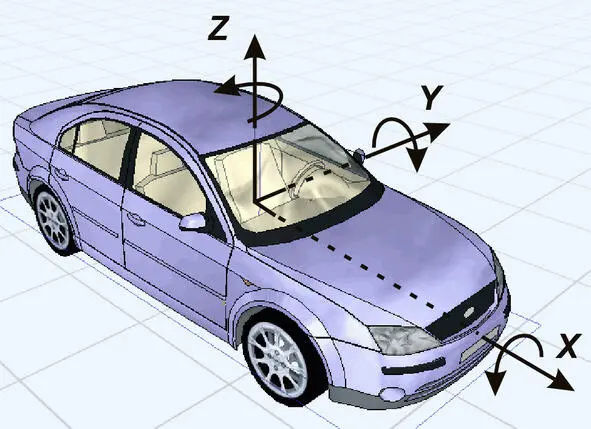
Рис. 1.3. Система координат автомобиля.
Рассмотрим рис. 1.4, на котором показан автомобиль в некоторой неподвижной системе координат XY , связанной, например, с дорогой. В этой системе координат ось X в плоскости чертежа направлена вправо, ось Y – вверх, а ось Z – перпендикулярна плоскости чертежа и направлена к зрителю. Пусть в этой системе координат положение центра тяжести автомобиля определятся точкой O` , которая, в свою очередь, является точкой начала координат X`Y` , связанной с автомобилем. При этом a – угол между осями OX и O`X` .
Как видно из рис. 1.4, в трехмерном пространстве оси координат Z и Z` обоих систем координат, глобальной и локальной соответственно, параллельны друг другу. Отклонение оси Z` от указанного положения в результате удара в автомобиль в большинстве случаев невелико, и этим можно пренебречь.
Поэтому далее для анализа движения автомобиля в плоскости или положения и направления силы удара нам понадобится только двухмерная система координат. Тогда, кроме параметров X C ? Y C и a в глобальной системе координат XY , требуется уметь находить координаты любой произвольной точки автомобиля, известные в локальной системе координат X`Y` .
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Реконструкция обстоятельств ДТП. Введение в современные методы экспертных исследований. Использование краш-тестов»
Представляем Вашему вниманию похожие книги на «Реконструкция обстоятельств ДТП. Введение в современные методы экспертных исследований. Использование краш-тестов» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.



Обсуждение, отзывы о книге «Реконструкция обстоятельств ДТП. Введение в современные методы экспертных исследований. Использование краш-тестов» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.