Вадим Мацкевич - Занимательная анатомия роботов
Здесь есть возможность читать онлайн «Вадим Мацкевич - Занимательная анатомия роботов» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1998, ISBN: 1998, Издательство: Радио и связь, Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Занимательная анатомия роботов
- Автор:
- Издательство:Радио и связь
- Жанр:
- Год:1998
- Город:Москва
- ISBN:5-256-00037-3
- Рейтинг книги:5 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Занимательная анатомия роботов: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Занимательная анатомия роботов»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Занимательная анатомия роботов — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Занимательная анатомия роботов», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Как мозг, так и машина состоят из определённых элементов, которые в своей совокупности образуют единое целое – систему. Это можно сказать как о всём мире в целом, так и об отдельных его частях.
Искусственные управляющие устройства так же как мозг человека, относят к одному и тому же классу самоуправляющихся систем. Все такого рода самоуправляющиеся системы называют кибернетическими.
Каждая система связана с внешним миром, который так или иначе влияет на неё и, в свою очередь, подвергается воздействиям с её стороны. Ту часть системы, которая воспринимает воздействие извне, называют входом, а ту, которой система действует на другие системы, – выход ом.
В одной системе может быть один, два или несколько входов и выходов. Регулятор Уатта, например, имеет один вход и один выход. На входе происходит изменение давления, на выходе – открывание или закрывание клапана. Человек как система имеет множество входов и выходов в виде нервных клеток, воспринимающих внешние воздействия и реагирующих на них.
Всякая кибернетическая система, как указывалось выше, является самоуправляющейся.
Но управление не сводится просто к передаче информации от управляющей части системы к исполнительному органу. Этот процесс гораздо сложнее.
Дело в том, что на исполнительный орган влияет не только управляющая система. Он подвержен непрерывным воздействиям окружающей среды, которые часто препятствуют исполнению приказов, полученных от управляющего центра. Например, корабль может отклониться от прямого пути под влиянием неожиданно поднявшегося ветра. Что предпринять в этом случае? Очевидно, нужно повернуть руль корабля так, чтобы он мог держать прежний курс. Противодействие случайным внешним влияниям – общий закон всякого регулирования.
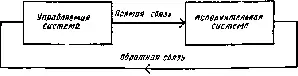
Самый надёжный способ противодействовать внешним возмущениям – это сделать так, чтобы всякое отклонение фактического поведения от заданного, независимо от того, чем оно обусловлено, вызывало определённую ответную реакцию, направленную на ликвидацию этого отклонения. В таком случае не нужно изучать его причины, определять силу ветра, направление течения и т.д.; заданное направление поддерживается автоматически. Такой способ управления был найден. Нужно, чтобы кроме прямой связи устройства управления с исполнительной системой была обеспечена связь выхода исполнительной системы с входом управляющей (см. рис. 65). Эту дополнительную связь называют обратной.
Примеры обратной связи мы уже видели выше. Обратная связь, вызывающая в результате своего действия ослабление внешнего влияния, носит название отрицательной обратной связи. Принцип регулирования на основе отрицательной обратной связи находит применение в любой управляемой системе, будь то кибернетическая машина или живой организм.
Положение о том, что регулирование в живом организме, в том числе в центральной нервной системе человека, происходит на основе отрицательной обратной связи, иногда называют основной гипотезой кибернетики.
Общий для кибернетических машин и живых организмов принцип обратной связи неслучаен. Ведь и те и другие вынуждены действовать в постоянно меняющихся условиях, поэтому реакции, вырабатываемые у них, должны отличаться разнообразием. Но для этого необходимо, чтобы из рабочего органа в центральную систему поступали соответствующие сигналы. Обратная связь лежит в основе восстановления и перестройки функций центральной нервной системы.
Нейроны
Прежде чем говорить о возможностях моделирования мозга как управляющего центра разумных действий, нужно представить себе элементы сложнейшей нервной системы – нейроны – и попытаться создать их модель.
Значительная или даже, пожалуй, основная часть нынешних исследовательских работ по бионике посвящена созданию аналогов биологического нейрона – нервной клетки – основного элемента нервной системы. Конечная цель этих работ – создание систем, предназначенных для накопления, обработки и передачи большого количества информации, электронных машин, способных решать любые сложные задачи без предварительного программирования, различных самообучающихся, адаптивных (самоприспосабливающихся, самоорганизующихся устройств), обладающих малыми габаритами и высокой надёжностью машин. Иными словами, речь идёт о создании широкого комплекса автоматических систем, работающих по тем же принципам.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Занимательная анатомия роботов»
Представляем Вашему вниманию похожие книги на «Занимательная анатомия роботов» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Айзек Азимов - Робот, который видел сны [Сны роботов]](/books/340771/ajzek-azimov-robot-kotoryj-videl-sny-sny-robotov-thumb.webp)




Обсуждение, отзывы о книге «Занимательная анатомия роботов» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.