Михаил Николаенко - Самоучитель по радиоэлектронике
Здесь есть возможность читать онлайн «Михаил Николаенко - Самоучитель по радиоэлектронике» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2006, ISBN: 2006, Издательство: НТ Пресс, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Самоучитель по радиоэлектронике
- Автор:
- Издательство:НТ Пресс
- Жанр:
- Год:2006
- Город:Москва
- ISBN:5-477-00054-6 (обл.); 5-477-00125-9 (пер.)
- Рейтинг книги:3.67 / 5. Голосов: 3
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Самоучитель по радиоэлектронике: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Самоучитель по радиоэлектронике»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Книга рассчитана на читателя с техническим складом ума, которому уже приходилось собирать электронные устройства, и адресована широкому кругу радиолюбителей, как профессионалам, так и начинающим.
Самоучитель по радиоэлектронике — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Самоучитель по радиоэлектронике», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
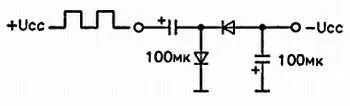
Рис. 2.47. Получение отрицательного напряжения
На вход подается любой прямоугольный сигнал, например сигнал с какого-либо делителя или тактового генератора. Можно использовать также регулярную последовательность импульсов, предназначенных для питания индикатора или для управления устройством памяти. Полученное на выходе схемы напряжение по абсолютной величине несколько меньше амплитуды прямоугольного сигнала. В ТТЛ схемах оно составляет приблизительно 4,5 В. Ток, потребляемый нагрузкой, не должен превышать нескольких миллиампер.
2.8.9. Источник аварийного питания
Иногда необходимо поддерживать питание устройства в течение некоторого времени, даже если напряжение сети отключается. Это важно, например, для цифровых часов, которые должны вести непрерывный счет времени. В случае кратковременного прерывания питания можно подключить к источнику напряжения конденсатор большой емкости, соблюдая при этом необходимые меры предосторожности. Гораздо надежнее другой вариант, не требующий больших затрат: использование батарейки и диода, предотвращающего протекание тока в обратном направлении (рис. 2.48). Такое решение не потребует большого дополнительного места. Установка аккумулятора (вместо батарейки) оправдана лишь в редких случаях, например для питания микроконтроллера.
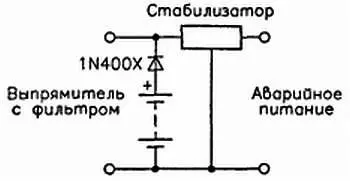
Рис. 2.48. Источник аварийного питания
2.9. Управление двигателем
2.9.1. Изменение направления вращения двигателя
Важное достоинство двигателей на постоянном токе заключается в том, что они могут вращаться в обоих направлениях — в зависимости от полярности питающего напряжения. Благодаря этому радиоуправляемые модели и игрушечные машины могут двигаться вперед или назад, а электрические отвертки, питаемые от аккумуляторов, завинчивают и отвинчивают винты и гайки.
Управление двигателем осуществляется с помощью специального трехпозиционного переключателя (с фиксацией или без в крайних положениях) или двух реле (рис. 2.49).
Первое реле с одним контактом обеспечивает включение и остановку двигателя. Второе реле, имеющее два контакта, позволяет изменять полярность подаваемого на двигатель напряжения и направление его вращения. Управление реле осуществляется с помощью двух логических сигналов. Отметим, что любители радиоуправляемых моделей все чаще применяют электронные вариаторы, выполняющие аналогичные операции без помощи реле и позволяющие регулировать скорость вращения двигателя.
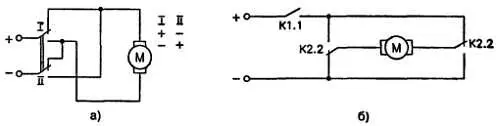
Рис. 2.49. Изменение направления вращения двигателя посредством переключателя ( а) и контактов реле ( б)
2.9.2. Полная мостовая схема управления вращением двигателя
Полная мостовая схема (Н-образный мост) содержит четыре выключателя, соединенных последовательно-параллельно. Широко распространен электронный вариант моста, где обычно используются транзисторы, работающие в режиме переключения. Такая схема часто служит для управления двигателем постоянного тока и позволяет изменять скорость и направление вращения.
Схема, приведенная на рис. 2.50а, иллюстрирует управление двигателем, который можно привести в одно из четырех различных состояний: вращения в одном или в другом направлении, отключения и принудительной остановки (торможения).
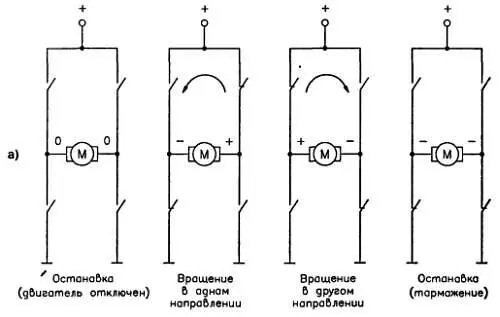
Последний вариант осуществляется путем одновременного замыкания двух нижних выключателей. В результате происходит закорачивание обмотки двигателя. Схема часто используется для управления двигателями в радиоуправляемых моделях. Последовательность сигналов должна быть достаточно точной: нужно избежать одновременного замыкания двух переключателей в одной ветви, что привело бы к закорачиванию источника питания. Чтобы выполнить это условие, для формирования управляющих сигналов обычно применяется специальное устройство. Путем периодического прерывания тока в ветвях моста можно изменять среднее значение тока, протекающего через двигатель, а следовательно, и скорость его вращения.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Самоучитель по радиоэлектронике»
Представляем Вашему вниманию похожие книги на «Самоучитель по радиоэлектронике» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Самоучитель по радиоэлектронике» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.