Юрий Почанин - Робототехника в промышленности
Здесь есть возможность читать онлайн «Юрий Почанин - Робототехника в промышленности» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2022, Жанр: Прочая научная литература, Прочая научная литература, pedagogy_book, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Робототехника в промышленности
- Автор:
- Жанр:
- Год:2022
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Робототехника в промышленности: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Робототехника в промышленности»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Робототехника в промышленности — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Робототехника в промышленности», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Максимальное усилие сжатия объекта манипулирования при гарантии надежного удержания и недопущении его разрушения или повреждения поверхности (благодаря применению эластичных накладок на пальцах ЗУ, силовых и силомоментных датчиков и т.п.).
Возможность применения для выполнения различных технологических операций и использования для работы с различными предметами производства в пределах одного или разных конструктивно-технологических классов достигается в результате применения:
–универсальных, широкодиапазонных и антропоморфных захватных устройств (в том числе за счет ручной перенастройки на детали разных размеров и использования сменных вкладышей и накладок);
–перенастраиваемых (в том числе автоматически) технологических головок;
–многоцелевых технологических головок, обеспечивающих выполнение нескольких технологических операций (например, головок, работающих с использованием методов электромагнитного или вихревого ориентирования деталей);
–автоматической смены захватных устройств и инструментов в соответствии с классом предметов производства и требованиями технологической операции.
Удобство технического обслуживания, замены и ремонта. Необходимо предусмотреть легкость и безопасность контрольного осмотра рабочего органа, возможность быстрой замены непрочных и изнашиваемых элементов конструкции, а также сменных деталей (накладок, вкладышей, пальцев). В целях уменьшения числа инструментов, требуемых для технического обслуживания, в конструкции рабочего органа по возможности следует использовать один и тот же тип крепежных деталей.
Классификация захватных устройств ПР проводится по нескольким принципам. Захватные устройства (ЗУ), или захваты, относятся к группе комплектующих изделий промышленных роботов. По принципу действия все ЗУ принято укрупненно подразделять на три группы: механические, вакуумные, магнитные, рис. 3.15.

Рис. 3.15. Классификация захватных устройств ПР по принципу действия
В приведенную классификацию дополнительно введены ЗУ с эластичными камерами, которые относят к группе универсальных захватов, и прочие ЗУ, к которым можно отнести, например, бесконтактные струйные и электростатические захваты. Рассмотрим другие частные классификации ЗУ по наиболее важным классификационным признакам.
По способу удержания объекта, рис. 3.16.
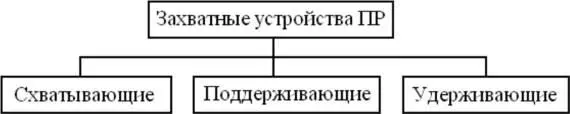
Рис. 3.16. Классификация захватных устройств ПР по способу удержания объекта
Схватывающие ЗУ удерживают объект благодаря кинематическому воздействию рабочих элементов (губок, пальцев, клещей) с помощью сил трения или комбинации сил трения и запирающих усилий. Все схватывающие ЗУ активного типа подразделяются на две группы: механические (клещи, тиски, шарнирные пальцы) и с эластичными рабочими камерами, деформирующимися под действием нагнетаемого внутрь сжатого воздуха или жидкости.
В поддерживающих ЗУ для удержания объекта используют нижнюю поверхность, выступающие части объекта или имеющиеся в его корпусе отверстия. К таким ЗУ относят крюки, петли, вилки, лопатки и захваты питателей, не зажимающие заготовки.
Удерживающие ЗУ обеспечивают силовое воздействие на объект благодаря использованию различных физических эффектов. Наиболее распространены вакуумные и магнитные ЗУ. Реже встречаются ЗУ, использующие эффект электростатического притяжения, адгезии и др.
По способу действия выделяют ЗУ: не приводные (например, с использованием пружины) и приводные (наличие какого-либо привода для срабатывания захвата).
По поверхности захватывания объекта: наружные (для захвата валов, корпусов, пластин) и внутренние (для захвата втулок, колец, шайб и т. п.).
По виду управления ЗУ подразделяются, рис. 3.17.
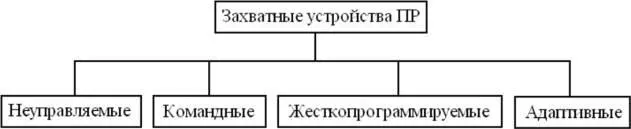
Рис. 3.17. Классификация захватных устройств ПР по виду управления
Неуправляемые —пружинные механические устройства с постоянными магнитами или с вакуумными присосками без принудительного разрежения. Для снятия объекта с таких ЗУ требуется усилие большее, чем усилие его удержания.
Командные ЗУ управляются только командами на захватывание или отпускание объекта. К этой группе относят ЗУ с пружинным приводом, оснащаемые стопорными устройствами и срабатывающие через такт. Разжимаются и зажимаются губки пружинных ЗУ благодаря взаимодействию их с объектом манипулирования.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Робототехника в промышленности»
Представляем Вашему вниманию похожие книги на «Робототехника в промышленности» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Робототехника в промышленности» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.