Юрий Почанин - Робототехника в промышленности
Здесь есть возможность читать онлайн «Юрий Почанин - Робототехника в промышленности» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2022, Жанр: Прочая научная литература, Прочая научная литература, pedagogy_book, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Робототехника в промышленности
- Автор:
- Жанр:
- Год:2022
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Робототехника в промышленности: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Робототехника в промышленности»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Робототехника в промышленности — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Робототехника в промышленности», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Устройство управления приводом. Устройство управления приводом может быть непрерывного действия, релейным, импульсным или цифровым.
Обобщенная функциональная схема привода промышленных роботов приведена на рис. 3.11.

Рис. 3.11. Обобщенная функциональная схема привода:
КС – канал связи; ОС – обратная связь
Функциональна схема электропривода. Электропривод современного ПР представляет собой комплекс приводов, каждый из которых управляет отдельной степенью подвижности. Рассмотрим на примере электроприводного ПР модели HdS05/06 (фирма GdA, Германия) наиболее распространенную функциональную схему, рис. 3.12.
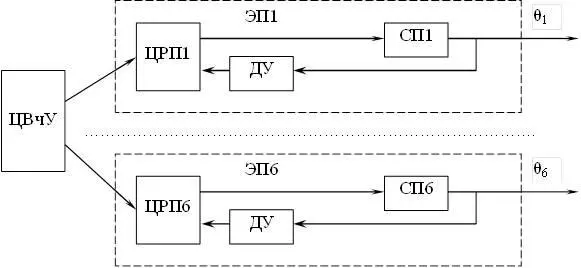
Рис.3.12. Функциональная схема управления электромеханического робота модели HdS05/06.
Данный ПР обладает шестью степенями подвижности, обозначенными на схеме как θ1…θ6. Все шесть электроприводов (ЭП1…ЭП6) управляются от общего центрального вычислительного устройства (ЦВчУ) системы программного управления (СПУ) ПР. Центральное вычислительное устройство выдает сигналы на цифровые регуляторы положения (ЦРП1-ЦРП6) отдельных приводов. Цифровые регуляторы положения управляют сервоприводами (СП1-СП6) в соответствии с сигналами ЦВчУ и датчиков угла (ДУ), например, кодовых датчиков угла с фотоэлектрическим преобразованием.
Одним из наиболее сложных и ответственных элементов в электроприводном ПР является сервопривод (СП). Схема сервопривода ПР приведена на рис. 3.13.
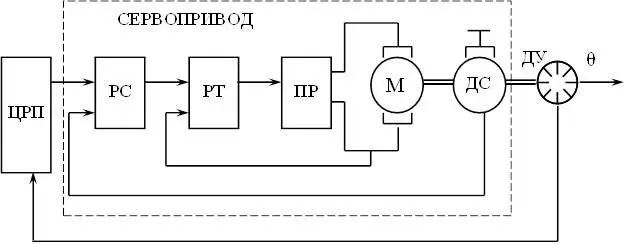
Рис. 3.13. Схема сервопривода ПР.
Данная схема представляет собой аналогово-цифровую систему автоматического управления, в которой сочетаются преимущества комбинированной аналоговой системы, работающей по принципу трехконтурной системы подчиненного регулирования, с достоинствами цифровой системы (высокая точность и удобство программирования).
Первый контур образован двигателем (М) с преобразователем (ПР) и регулятором тока (РТ). Во второй контур входят датчик скорости (ДС) и регулятор скорости (РС). В состав третьего контура дополнительно входят датчик угла (ДУ) и цифровой регулятор положения (ЦРП).
В качестве регуляторов скорости и тока в ПР чаще всего используются аналоговые, а в последнее время – и цифровые, операционные усилители с помощью которых легко реализуется практически любой требуемый закон управления. Датчик скорости также может быть как аналоговым, так и цифровым.
В ряде случаев применение датчика скорости не требуется, т.к. сигнал об изменении скорости может быть вычислен в цифровом регуляторе положения (ЦРП) путем дифференцирования сигнала с датчика угла (ДУ)
Современные тенденции развития робототехники таковы, что позволяют выпускать сервоприводы, которые конструктивно объединяют двигатель, преобразователь, датчики и регуляторы скорости и тока.
Для электроприводов используют специальные двигатели с электромагнитным тормозом и управлением от ЧПУ, обеспечивающие многопозиционное или контурное управление. В малых и средних роботах применяются высоко моментные шаговые приводы. Электроприводы комплектуют шаговыми и линейными двигателями.
Структура устройства программного управления приводом показана на рис.3.14.
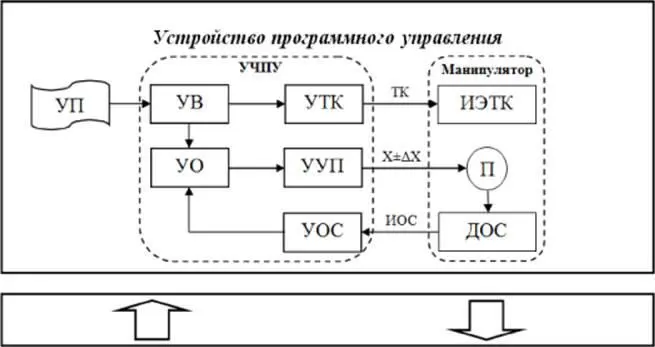
Рис. 3.14. Структура устройства программного управления:
УП—управляющая программа; УВ—устройство ввода; УО—устройство обработки; УУП—устройство управления приводом; УТК—устройство технических команд; УОС—устройство обратной связи; ИЭТК—исполнительные элементы технологических команд; П—привод; ДОС—датчик обратной связи; ТК—технологическая команда; ИОС—информация обратной связи.
В общем случае, структура привода образована устройством управления, состоящим из информационной и силовой частей, двигателя, передаточного устройства, выполняющего передачу механического движения от двигателя к исполнительному органу и согласование видов их движений и их параметров.
Структура электропривода роботов, в общем случае, образована электродвигателем с датчиками обратной связи по положению и скорости, передаточным устройством (механической передачей), тормозом, муфтами (например, для защиты двигателя от перегрузки) и устройством управления.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Робототехника в промышленности»
Представляем Вашему вниманию похожие книги на «Робототехника в промышленности» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Робототехника в промышленности» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.