Андраник Иосифьян - Электромеханика в космосе
Здесь есть возможность читать онлайн «Андраник Иосифьян - Электромеханика в космосе» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: М., Год выпуска: 1977, Издательство: Знание, Жанр: Прочая научная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Электромеханика в космосе
- Автор:
- Издательство:Знание
- Жанр:
- Год:1977
- Город:М.
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Электромеханика в космосе: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Электромеханика в космосе»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Она рассчитана на широкий круг читателей.
Электромеханика в космосе — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Электромеханика в космосе», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
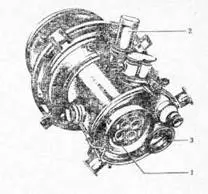
Рис. 8. Приборный узел построителя местной вертикали:
1 — телевизионные датчики; 2 — инфракрасный датчик; 3 — датчик построителя местной вертикали
По изменению интенсивности теплового излучения планеты, воспринимаемого при вращении зеркала, оптическая система с болометром позволяет определять граничный контур планеты в космосе и по этой границе осуществляет пеленгацию. По величине получаемой болометром энергии излучения автоматически (с помощью электронной аппаратуры) определяются угловые отклонения осей космического аппарата от запеленгованного направления, проходящего через центр планеты. Эти отклонения в виде электрических сигналов передаются в систему управления космического летательного аппарата, и с помощью силовых органов управления космический летательный аппарат ориентируется относительно двух осей — оси крена и оси тангажа. Благодаря этому создается следящая система, обеспечивающая ориентацию космического летательного аппарата относительно оси, проходящей через центр масс планеты.
Таковы принципы действия чувствительных приборов для «видимых» ориентиров, спектральные свойства и интенсивность которых могут быть зарегистрированы чувствительными элементами.
Электромеханические гироскопы различных назначений. Электромеханические гироскопы применяются в. качестве силовых стабилизаторов, датчиков угловых скоростей, ускорений, а также в качестве датчиков курса, называемых обычно гироорбитантами. Рассмотрим общие свойства электромеханических гироскопов.
Электромеханический гироскоп представляет собой электрический двигатель с ротором, обладающим большим моментом инерции и выполненным в виде маховика. Чтобы обеспечить большую маховую массу ротора, последний конструируют как внешнюю часть электродвигателя. Ротор гироскопа не имеет выходного устройства вала, так как, вращаясь в подшипниках, он работает только на разгон своей массы или на ее торможение. Статор электродвигателя при питании постоянным током имеет систему полюсов машины постоянного тока со щеткодержателями. При питании переменным током статор двигателя-гироскопа является статором обычного двух- или трехфазного электродвигателя.
Рассмотрим некоторые электромеханические характеристики гироскопа на постоянном токе, физически более простые при анализе работы электродвигателей-маховиков для систем ориентации космического летательного аппарата.
Непосредственно после включения такого двигателя в сеть начинается период разгона ротора, в течение которого двигатель потребляет большой ток и развивает большой момент вращения, обеспечивающий этот разгон. По мере разгона ротора и возникновения в его обмотках электродвижущей силы обратного направления, ток при постоянно приложенном напряжении автоматически уменьшается (вместе с моментом вращения) до ничтожной величины, достаточной только для преодоления трения в подшипниках и побочных потерь. При работе ротора гироскопа в глубоком вакууме энергия, подводимая к двигателю, расходуется только на потери в подшипниках и электромагнитные потери в статоре и роторе. В течение последних лет повсеместно в электромеханических гироскопах коллекторные машины постоянного тока были заменены двигателями переменного тока повышенной частоты [2] Из-за осложнений, связанных с применением коллектора.
. Возникающее при этом вращающееся поле разгоняет ротор до допустимого по прочности конструкции числа оборотов, исчисляемого обычно десятками тысяч в минуту.
Такое устройство с постоянно вращающимся ротором обладает весьма интересными свойствами. Если, например, держать корпус такой машины двумя руками, расположив ось вращения перпендикулярно к туловищу, и поворачивать корпус вокруг собственной оси вращения, то руки экспериментатора никакой внешней силы чувствовать не будут, кроме сил тяжести и ничтожных сил, вызываемых трением в подшипниках (а в условиях невесомости и сила тяжести не будет ощущаться). Если теперь попытаться повернуть корпус электродвигателя на себя или от себя, т. е. вокруг оси, перпендикулярной к собственной оси вращения, то мускулы рук в соответствии с законами механики будут ощущать достаточно большую силу, направление которой будет несколько неожиданным: оно не будет совпадать с направлением, по которому была сделана попытка повернуть ось гироскопа. Электродвигатель-гироскоп будет создавать такой момент вращения, при котором направление собственной оси ротора совпало бы с направлением оси, вокруг которой экспериментатор пытается повернуть корпус на себя или от себя. Такой гироскоп (рис. 9) называется моментным электрогироскопом и используется, как будет показано в дальнейшем, для поворота корпуса искусственного спутника Земли вокруг своих строительных осей.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Электромеханика в космосе»
Представляем Вашему вниманию похожие книги на «Электромеханика в космосе» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Владимир Аринин - Цветок в космосе [повесть]](/books/27360/vladimir-arinin-cvetok-v-kosmose-povest-thumb.webp)




Обсуждение, отзывы о книге «Электромеханика в космосе» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.