Андраник Иосифьян - Электромеханика в космосе
Здесь есть возможность читать онлайн «Андраник Иосифьян - Электромеханика в космосе» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: М., Год выпуска: 1977, Издательство: Знание, Жанр: Прочая научная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Электромеханика в космосе
- Автор:
- Издательство:Знание
- Жанр:
- Год:1977
- Город:М.
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Электромеханика в космосе: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Электромеханика в космосе»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Она рассчитана на широкий круг читателей.
Электромеханика в космосе — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Электромеханика в космосе», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
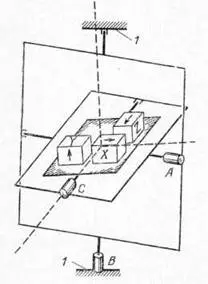
Рис. 2. Схема стабилизированной платформы:
1 — корпус; ABC — датчики с моментными электродвигателями; XYZ — приборы-датчики стабилизации по трем осям
Рулевые органы ракеты-носителя снабжены электромеханическими и электрогидравлическими приводами и соответствующими электромагнитными механизмами, обеспечивающими передачу электрических сигналов от датчиков.
Перейдем теперь к основным динамическим процессам, сопровождающим отделение космического летательного аппарата [1] Здесь и далее мы под космическим летательным аппаратом будем понимать полезный груз ракеты-носителя.
от ракеты-носителя, а именно — к ориентации и стабилизации и дальнейшему функционированию аппарата как в свободном полете, так и при корректировании траектории орбиты, необходимом для дальнейшего движения в соответствии с программой полета.
После вывода на орбиту космического летательного аппарата и отключения двигателей последней ступени ракеты-носителя программное устройство (электромеханический часовой механизм или ЭВМ), находящееся в этой ступени, подает сигнал в электропиротехническое устройство, которое отталкивает космический аппарат от ракеты-носителя.
Следовательно, после отделения от последней ступени ракеты-носителя космический летательный аппарат представляет собой тело, центр масс которого движется вдоль круговой, эллиптической или другой траектории. Космический аппарат в целом может вращаться с определенной угловой скоростью относительно мгновенной оси, проходящей через его центр масс. Происходит это потому, что механические силы, отделяющие космический летательный аппарат от ракеты-носителя, в момент отделения не являются одинаковыми. Вследствие этого возникают вращательные моменты относительно центра масс, и под действием этих вращательных импульсных моментов аппарат приобретает мгновенную угловую скорость относительно некоторой оси.
Возможность аппарата занимать любое положение в пространстве при движении его центра масс по некоторой космической траектории и определяет законы управления автономными электромеханическими системами в зависимости от назначения космического аппарата.
Пусть, например, космический летательный аппарат предназначен для фотографирования поверхности облачного и ледового покровов Земли. Эта задача выполняется космической метеорологической системой, функциональная схема которой представлена на рис. 3. Всю фотоинформацию система должна закодировать в форме электрических сигналов, запомнить их и затем передать на Землю, где эту телефотоинформацию должна принять наземная радиостанция. Для расшифровки, а главное, для обеспечения географической привязки I получаемой информации к местности при дальнейшей обработке необходимы ориентация и стабилизация фотоаппаратуры относительно некоторой оси, проходящей все время через центр масс той или иной планеты (в частности, Земли). Это направление будет перпендикулярно к поверхности планеты и тем самым по периоду вращения можно будет привязать полученную фотографию изображения к местности.
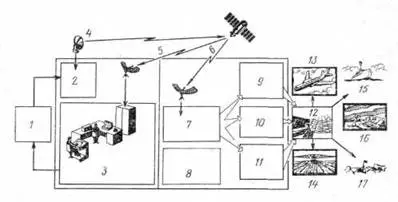
Рис. 3. Функциональная схема космической метеорологической системы:
1 — пункт управления; 2 — наземная аппаратура командной радиолинии; 3 — пункт автоматической обработки телеметрической информации; 4 — командная радиолиния; 5 — телеметрическая информация; 6 — радиолиния метеорологической информации; 7— аппаратура преобразования метеорологической информации; 8 — пункты приема метеорологической информации; 9 — обработка телевизионной информации; 10 — обработка актинометрической информации; 11 — обработка инфракрасной информации; 12 — Гидрометеоцентр СССР. Выпуск прогнозов: 13 — для авиации; 14 — для сельского хозяйства; 15 — для кораблей морского флота; 16 — для населения об опасных явлениях погоды; 17 — о состоянии ледяного покрова
Из этого примера следует, что функции систем управления любого космического аппарата сводятся к тому, чтобы, во-первых, обеспечить начальное «успокоение» аппарата после его отделения от ракеты-носителя (т. е. чтобы свести к минимуму угловую скорость вращения, полученную им в момент отделения), и, во-вторых, обеспечить соответствующие программные повороты вокруг трех взаимно ортогональных строительных осей, жестко связанных с центром масс космического летательного аппарата. Система управления должна, кроме того, иметь возможность осуществлять поиск специальных ориентиров (Земли, Луны, Солнца, планет Солнечной системы, звезд) и обеспечивать стабилизацию космического аппарата относительно этих ориентиров с точностью, необходимой для работы бортовых аппаратов и научных приборов. В функцию системы управления также входит стабилизация космического летательного аппарата по заданному курсу и автоматическое управление реактивными двигателями для изменения траектории центра масс и маневрирования кораблем.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Электромеханика в космосе»
Представляем Вашему вниманию похожие книги на «Электромеханика в космосе» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Владимир Аринин - Цветок в космосе [повесть]](/books/27360/vladimir-arinin-cvetok-v-kosmose-povest-thumb.webp)




Обсуждение, отзывы о книге «Электромеханика в космосе» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.