Алексей Яковлев - Нейрореабилитация. Часть 1
Здесь есть возможность читать онлайн «Алексей Яковлев - Нейрореабилитация. Часть 1» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. ISBN: , Жанр: Медицина, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Нейрореабилитация. Часть 1
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:9785449619624
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Нейрореабилитация. Часть 1: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Нейрореабилитация. Часть 1»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Нейрореабилитация. Часть 1 — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Нейрореабилитация. Часть 1», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
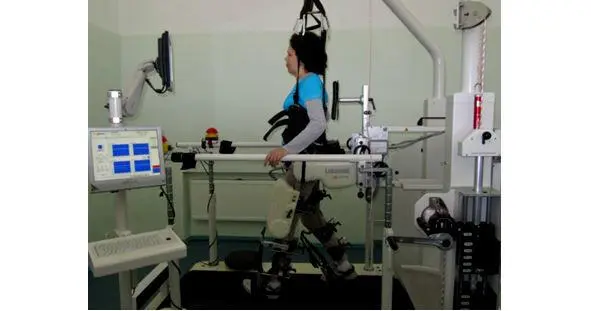
Рисунок 14. Роботизированный комплекс «Lokomat»
Благодаря занятиям на роботизированной системе увеличивается сила, мышечная выносливость на нижних конечностях, тренируется кардио-респираторная система, разрабатывается контрактура, восстанавливается чувствительность на ногах, улучшается кровообращение и лимфообращение. Целью задействования системы является улучшение двигательной способности больных, имеющих неврологические патологии, нарушения движений, с использованием концепции нейропластичности. В занятиях на «Lokomat» скомбинированы функциональное локомоторное лечение и мотивация, выполнение оценки состояния больного, для чего используются обратная связь, виртуальная реальность. В экспериментальных работах Remple M.S. с соавтр. (2001), Luke L.M., Allred R.P., Jones T.A. (2004) выявлено, что после 400 повторений движений, отмечаются изменения в synapse density в первичной двигательной коре. В тоже время в исследованиях C.E. Lang et al. (2007), показано, что в течение 35-минутного традиционного занятия ЛФК больной в среднем совершает 39 активных, 34 пассивных и 12 целенаправленных движений конечности, которые, однако, не будут абсолютно одинаковы, одноамплитудны, симметричны и в своем функциональном плане максимально приближены к физиологическим. Это создает сложности в эффективности реабилитации пациентов с тяжелым и грубым неврологическим дефицитом, так как такая тренировка оказывается недостаточным стимулом для активизации процессов нейропластичности. Нейропластичность – это совокупность различных процессов ремоделирования синаптических связей, направленных на оптимизацию функционирования нейрональных сетей, и играющая решающую роль в процессах филогенеза и онтогенеза (при установлении новых синаптических связей, возникающих при обучении, а также при поддержании функционирования уже сформированных нейрональных сетей – первичная (естественная) нейропластичность, а также после повреждения структур нервной системы, в ходе восстановления утраченных функций – посттравматическая нейропластичность. В многочисленных экспериментальных и клинических исследованиях показано, что в активизации механизмов нейропластичности ЦНС важную роль играют различные методы медицинской реабилитации. Как видно из данных исследований роботизированная техника создает возможность выполнения гораздо большего количества физиологических эргономичных движений нежили классическая активно-пассивная гимнастика. Более массивное активизирующее воздействие на процессы нейропластичности, в том числе осуществляемое через механизм БОС и стимуляцию сенсорных систем, главный тезис патогенетического обоснования эффективности роботизированных реабилитационных комплексов.
Сегодня направление роботизированных технологий в реабилитации и хирургии превратилось в интенсивно развивающуюся отрасль. Новое поколение роботизированных систем представляет собой уже не только статичные стационарные комплексы, но и динамические мобильные аппараты с возможностью максимально динамичной тренировки в сочетании с электронейромиографической-стимуляцией. Такой системой является к примеру аппарат «Walk trainer» (рис.15).
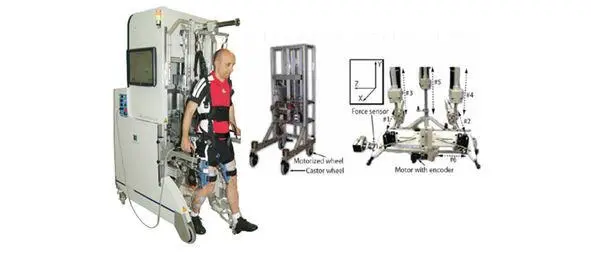
Рисунок 15. Роботизированный комплекс «Walk trainer»
Еще одним инновационным направлением современной нейрореабилитологии является бионическое протезирование. Бионическое протезирование становится процветающей областью науки, являясь примером современнейших высокотехнологичных реабилитационных технологий, связанных с разработкой устройств имитирующих работу «живых органов» – конечностей, слухового, зрительного и иных анализаторов. Проблема протезирования стала особенно острой после драматических событий Первой и Второй Мировой войн, когда большое количество ампутантов, пострадавших в боевых действиях нуждалось в помощи специалистов по протезированию и реабилитации. В наше время данная проблема не теряет своей актуальности. Одним из достижений последних лет в области бионического протезирования можно считать разработку протеза для верхней конечности – кисть «Michelangelo» (рис.16). Искусственная конечность состоит из твердых и мягких элементов, которые играют роль костей, суставов, соединительной ткани и сухожилий. Возможности данного протеза позволяют научиться регулировать скорость движения пальцев и силу сжатия. «Michelangelo» – это миоэлектрический протез, так как управление происходит с помощью импульсов, которые генерируют мышцы пользователя и передаются двумя подкожными электродами. Каждый палец оборудован собственными двигательными осями. Рука имеет 3 автоматических режима и 7 функций, рассчитанных на различные действия. Запястье протеза – это уникальная разработка, которая называется «Axonwrist» и является очень гибким и многофункциональным. В частности, можно согнуть руку, повернуть ее вверх или вниз. В начале запястье имеет овальный элемент, похожий на настоящий человеческий сустав. В него встроили блок управления с емкой батареей, которой хватает на целый день работы. Размеры руки позволяют ее подбирать индивидуального для каждого пациента.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Нейрореабилитация. Часть 1»
Представляем Вашему вниманию похожие книги на «Нейрореабилитация. Часть 1» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.






Обсуждение, отзывы о книге «Нейрореабилитация. Часть 1» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.