Вячеслав Довгань - Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам
Здесь есть возможность читать онлайн «Вячеслав Довгань - Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Ростов-на-Дону, Год выпуска: 2015, ISBN: 2015, Издательство: Издательство Южного федерального университета, Жанр: История, Биографии и Мемуары, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам
- Автор:
- Издательство:Издательство Южного федерального университета
- Жанр:
- Год:2015
- Город:Ростов-на-Дону
- ISBN:ISBN 978-5-9275-1532-5
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Специфика же управления заключалась:
♦ в отсутствии непосредственного восприятия оператором процесса самого движения;
♦ в затруднённом восприятии местности по телеэкрану;
♦ во временных задержках при выдаче на борт радиокоманд и при приёме оттуда телевизионного изображения и телеметрической информации;
♦ наконец, в зависимости характеристик подвижности самоходного шасси от условий рельефа и физико-механических свойств лунного грунта.
Эти особенности потребовали наличия определённых навыков и психофизических качеств. К первым относились способность оперировать пространственными представлениями в отрыве от управляемого ТС и умение оценивать обстановку с упреждением во времени для компенсации временных задержек в системе управления. Ко вторым - хорошая память, способность к длительному вниманию, быстрота реакции и осмысления информации, умение по телевизионному изображению оперативно оценивать конкретную обстановку, определять расстояние до препятствий и их размеры, выбирать рациональный маршрут движения ТС и принимать решение по методу его управления.
В настоящее время в мировой практике управления инопланетным ТС применяется термин телеоператорное управление.
Панорамная телевизионная система предназначена для топографической съёмки местности, исследования её структуры, а также для наблюдения Земли и Солнца.
Четыре панорамные телефотокамеры типа Я-198, аналогичные тем, которые применялись на «Луне-9» и «Луне-13», для лунохода были модифицированы и попарно (вертикального и бокового обзора) установлены по левой и правой сторонам приборного отсека.
Чёткость изображения такой системы раз в десять выше, чем чёткость изображения на экране ВКУ. Это позволяет применять её в навигационных целях, а также и для проведения морфологических и топографических исследований лунной поверхности. Панорамные камеры работают только во время стоянок лунохода и передают изображения неподвижных объектов окружающей местности.
У камеры вертикального обзора (астротелефотометра) сечение телесного угла 360° на 30°. Принимаемое от неё изображение называют астропанорамой. Вращаясь подобно аттракционному «колесу обозрения», она фиксирует всё, что находится впереди лунохода, под ним, сзади и вверху. В поле зрения этих камер попадали передние и задние колёса, что позволяло оценить характер их взаимодействия с грунтом. Также они могли в определённых случаях зафиксировать положение Солнца и Земли на небосводе, что использовалось при решении навигационных задач.
К каждой камере был пристроен специальный оптический прибор - датчик лунной вертикали (определитель местной вертикали -ОМВ). Он представлял собой стеклянную чашу с нанесённой на её внутренней поверхности радиальной калибровочной шкалой, по которой свободно перемещался металлический шарик. Его нахождение соответствовало положению лунохода на поверхности. Изображение ОМВ являлось обязательной частью астропанорамы.
Камера бокового обзора с сечением телесного угла 180° на 30° фиксирует все объекты, находящиеся по левую (правую) стороны.
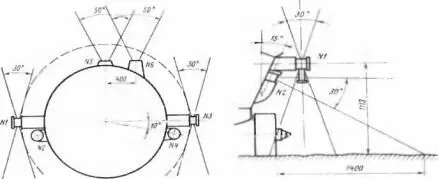
Рис. 34. Расположение камер телефотометров (№ 1,2,3,4) относительно передних камер малокадрового ТВ (№5 и№6)
Одной из их функций является обеспечение безопасного схода лунохода с посадочной ступени. По принимаемым изображениям телевизионной курсовой камеры водитель из-за т.н. «мёртвой зоны» (1,2 м) не видит передние колёса и раскрытые трапы, не может оценить расположение их концов на лунной поверхности и отсутствие препятствий для схода, обстановку слева и справа и, тем более, позади лунохода.
По принятым панорамам вертикального и бокового обзора местности штурман оперативно составляет топографическую схему места посадки, по которой выбирается наиболее благоприятное направление схода и первоначального движения лунохода.
Сам процесс схода лунохода и дальнейшего движения мог контролироваться курсовой камерой.
Одной из задач навигации является уточнение координат места посадки.
Другой - прокладка на планшете штурмана трассы движения лунохода. В этом случае используется телеметрическая информация гироскопической курсовой системы и датчиков 3-го и 6-го мотор-колёс, измеряющим скорость вращения ведущих колёс, а также девятого, свободно катящегося колеса и измеряющего пройденный путь («спидометра»).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам»
Представляем Вашему вниманию похожие книги на «Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.