Грегори Гбур - Загадка падающей кошки и фундаментальная физика
Здесь есть возможность читать онлайн «Грегори Гбур - Загадка падающей кошки и фундаментальная физика» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2021, ISBN: 2021, Издательство: Альпина нон-фикшн, Жанр: Физика, Домашние животные, sci_popular, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Загадка падающей кошки и фундаментальная физика
- Автор:
- Издательство:Альпина нон-фикшн
- Жанр:
- Год:2021
- Город:Москва
- ISBN:978-5-0013-9363-4
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Загадка падающей кошки и фундаментальная физика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Загадка падающей кошки и фундаментальная физика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
В своей увлекательной и остроумной книге физик и заядлый кошатник Грегори Гбур показывает, как попытки понять механику падения кошек помогли разобраться в самых разных задачах в математике, физике, физиологии, неврологии и космической биологии, способствовали развитию фотографии и кинематографа и оказали влияние даже на робототехнику.
Поиск ответа на загадку падающей кошки погружает читателей в увлекательный мир науки, из которого они узнают решение головоломки, но также обнаружат, что феномен кошачьего выверта по-прежнему вызывает горячие споры ученых.
Автор убежден, что чем больше мы исследуем поведение этих животных, тем больше сюрпризов они нам преподносят.
Загадка падающей кошки и фундаментальная физика — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Загадка падающей кошки и фундаментальная физика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Нельзя сказать, что вариант, при котором робот споткнется, был совершенно неожиданным. Его заранее рассматривали и разбирали со всех возможных сторон — и очень этого боялись. Как сказал Джон Беарс — специалист по робототехнике из Университета Карнеги — Меллона: «В худших своих кошмарах мы видели, как одна из ног погружается в землю и просто не выходит обратно» {2} . «Данте II» был разработан с прицелом на статическую стабильность : имея восемь ног, он должен был в любой момент держать более чем две из них на грунте, даже при ходьбе. Благодаря своей конструкции робот был способен автономно передвигаться по пересеченной местности, но ничто в управляющей им программе не позволяло ему вносить поправки в случае неожиданных соскальзываний и падений.
Дело было не в ограничениях конструкции «Данте II», которая на тот момент являлась суперсовременной. Робототехника с давних времен страдала от неспособности машин адаптироваться к сложным условиям среды. Какой-нибудь робот, с легкостью преодолевающий обстановку смоделированного офиса, где мебель имитируется простыми геометрическими фигурами, полностью теряется, оказавшись в сложной обстановке реального офиса.
Но время шло, и появлялись новые стратегии. Когда «Данте II» упал, специалисты по робототехнике как раз пробовали новый подход к конструированию машин; вдохновение в этом новом подходе они черпали из природы, ориентируясь на биологические системы. Эволюция давно уже решила многие из задач, которыми занимаются сегодня создатели роботов, поэтому естественно было обратиться за готовыми решениями к продуктам эволюции. Насекомое, к примеру, может иметь почти такую же форму, что и «Данте II», но при этом оно способно преодолевать чрезвычайно сложный рельеф и даже адаптироваться к потере одной или нескольких конечностей. И любому роботу, предназначенному для функционирования в опасной среде, придется научиться имитировать такое умение. Возникшее при этом новое поле исследований на стыке биологии и робототехники получило название биоробототехника , и падающая кошка стала важным объектом исследований в этой новой области. Оказалось, кстати говоря, что рефлексивное переворачивание кошки роботам необычайно сложно имитировать.
Биоробототехнику можно условно разделить на две подобласти — два поля исследований {3} . Первое — это робототехника, вдохновляемая биологическими идеями ; в ней биологические системы изучаются с целью создания новых роботов. Вторая — биоробототехническое моделирование , при котором роботизированные модели животных конструируются для того, чтобы лучше разобраться в биологии животных.
Обе эти стратегии существовали задолго до того, как в оборот было пущено слово робот , даже раньше, чем человеку удалось обуздать электричество и создать первые электрические машины. Автор первых фотографий падающей кошки Этьен-Жюль Марей, к примеру, делал механические модели системы кровообращения, летающих насекомых и птиц. Он использовал эти схемы , как он их называл, для того чтобы понять, как животные живут и двигаются.
По иронии судьбы первую механическую модель падающей кошки — хотя и очень грубую — изготовил в 1894 г. Марсель Депре, который поначалу яростнее всех возражал против кошачьих фотографий Марея. Согласившись в конечном итоге с точкой зрения Марея, Депре опубликовал статью, в которой описал свое устройство {4} .
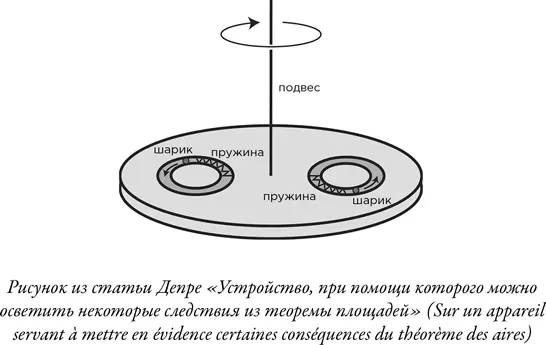
Плоский диск свободно подвешен на веревке и висит горизонтально. В поверхности диска вырезаны две кольцевые выемки, в каждой из которых находятся пружинка и металлический шарик, который она может толкнуть. Обе пружинки сжаты и сдерживаются нитями. Когда нити пережигают и тем самым освобождают пружинки, оба шарика запускаются по выемкам, проходят полный круг и оказываются в итоге в том же месте, откуда стартовали. Шарики движутся в одном направлении, и по закону сохранения момента импульса весь диск должен повернуться на какой-то угол в противоположном направлении. Однако поворота диска на полные 360º не произойдет, потому что он намного тяжелее шариков. В результате система окажется в том же внутреннем состоянии, с какого начинала, — мы пренебрежем небольшим изменением, связанным со сжатием пружин, — но повернутой на некоторый конечный угол. В эксперименте Депре устройство повернулось на 40º. Эта система, утверждал он, аналогична кошке, поскольку кошка тоже использует внутреннее движение, чтобы в конечном итоге развернуться в противоположную сторону, несмотря на то что в конце ее тело имеет ту же форму, что и в начале.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Загадка падающей кошки и фундаментальная физика»
Представляем Вашему вниманию похожие книги на «Загадка падающей кошки и фундаментальная физика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.



Обсуждение, отзывы о книге «Загадка падающей кошки и фундаментальная физика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.