Джон Будро - Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres]
Здесь есть возможность читать онлайн «Джон Будро - Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres]» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2019, ISBN: 2019, Издательство: Литагент Альпина, Жанр: Деловая литература, management, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
![Джон Будро Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres] обложка книги](/books/409853/dzhon-budro-reinzhiniring-biznesa-kak-gramotno-vned.webp)
- Название:Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres]
- Автор:
- Издательство:Литагент Альпина
- Жанр:
- Год:2019
- Город:Москва
- ISBN:978-5-9614-2704-2
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres]: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres]»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Равин Джесутасан и Джон Будро, признанные авторитеты в вопросах человеческого капитала и автоматизации, не ограничиваются попытками определить, в чем именно роботы заменят людей. Авторы предлагают системный подход в формате пошаговой четырехступенчатой модели, с помощью которой менеджеры сумеют найти оптимальное соотношение искусственного интеллекта и работы специалистов.
Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres] — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres]», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
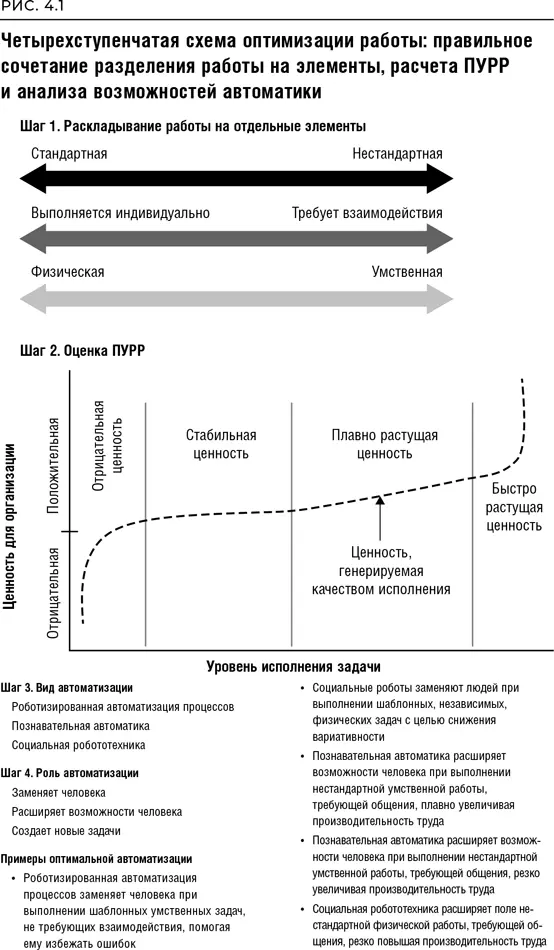
2. Каковы характеристики его работы:
а) стандартная – нестандартная;
б) выполняется независимо – требует общения;
в) физическая – умственная?
3. Как можно оценить ПУРР этой работы:
а) исключение ошибок (первый отрезок графика ПУРР);
б) снижение вариативности (второй отрезок графика ПУРР);
в) плавное возрастание ценности (третий отрезок графика ПУРР);
г) быстрое возрастание ценности (четвертый отрезок графика ПУРР)?
4. Какую роль в данном случае сыграет автоматика: сможет ли она полностью заменить человека, расширит его возможности или создаст новую сферу деятельности?
5. Какие виды автоматизации доступны: роботизированная автоматизация процессов, познавательная автоматика, социальная робототехника?
6. Каков оптимальный способ объединить возможности людей и механизмов в рамках связанных видов работ и производственных процессов?
Рис. 4.1 графически изображает нашу четырехступенчатую модель. Подобный подход поможет справиться с задачами, которые часто обескураживают и пугают: обозначить стратегические цели автоматизации, а затем разобраться в том, как именно следует пересмотреть задачи отдельных сотрудников и рабочие процессы в свете достижения этих целей.
Для того чтобы лучше понять механизм действия данного метода, мы в следующих разделах разберем на конкретных примерах, каким образом все четыре элемента нашей системы, объединяясь, помогают созданию оптимальной модели автоматизации. Конечно, никто не гарантирует, что предложенное решение – лучшее из всех возможных: как говорится, нет предела совершенству, да и вообще везде необходим индивидуальный и творческий подход.
Кроме того, в помощь читателям мы приведем в приложении таблицу, отражающую оптимальное сочетание трудовых ресурсов человека и машины для каждого отдельного вида работы.
Стандартная физическая работа, выполняемая индивидуально (отрицательная ценность): замена человека социальными роботами
Если раньше на производстве приходилось держать целый штат контролеров ОТК, то теперь роботы способны с успехом заменить этих сотрудников. Вот как, например, действуют роботы-контролеры от компании Compass Automation:
«Обрабатывающий центр снабжен конвейером выгрузки, который доставляет произведенную продукцию к автоматической системе. При поступлении туда готовой детали она прежде всего попадает с конвейера во впускное устройство; при этом включается специальный датчик, который связывается с роботом. Робот LR Mate 200iC перемещает деталь к устройству обдува, чтобы удалить остатки жидкости, использовавшейся при обработке, после чего отправляет ее в отделение верификации. Там проводится контроль углов зубцов и глубин внутренней резьбы. Затем робот доставляет деталь в отделение визуальной инспекции, где специально настроенная контрольная система измеряет несколько геометрических показателей, включая высоту и диаметр изделия. Наконец, тот же робот отправляет его на впускной конвейер для последующей обработки и упаковки. Данная система, разработанная специалистами компании Compass Automation, позволяет человеку, действуя совместно с роботом FANUC LR Mate 200iC, обеспечивать соответствие продукции стандартам, заданным заказчиком, осуществляя тщательную и всестороннюю техническую инспекцию. Compass Automation разрабатывает полную модель каждой из создаваемых под заказ систем перед тем, как приступить непосредственно к сборке» [29] . “Robotic Part Inspection with the FANUC LR Mate 200i Robot,” FANUC; http://www.fanucamerica.com/home/news-resources/case-studies/Inspection-Robot-Performs-Complete-Part-Inspection-Compass-Automation .
.
Контроль качества деталей – классический вид задач, относящихся к первой части графика ПУРР. Прибыль в данном случае генерируется способностью отбраковывать всю нестандартную продукцию. При этом работа по более высокому стандарту (например, контроль дефектов, не входящих в контрольный список) не создает дополнительной ценности. А вот пропуск брака приносит предприятию финансовые потери. Замена контролера-человека комбинацией визуальных датчиков, искусственного интеллекта и точных измерительных механизмов открывает возможность задействовать социального робота, который, передвигаясь по заводу, обеспечивает более эффективный контроль качества деталей, допуская меньшее число ошибок. То же самое касается и работ, связанных с риском производственного травматизма или с нанесением ущерба окружающей среде. Замена людей автоматами снижает вероятность ошибок и одновременно помогает избежать травмы или даже гибели работника – это, пожалуй, является крайней формой отрицательной ценности на графике ПУРР. К примеру, горно-металлургическая компания Rio Tinto задействовала на шахтах в Пилбаре (Австралия) автоматизированные шахтные самосвалы и бурильные машины. Тем самым ей удалось добиться экономии электроэнергии и повышения безопасности труда.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres]»
Представляем Вашему вниманию похожие книги на «Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres]» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.
![Мередит Бруссард - Искусственный интеллект [Пределы возможного] [litres]](/books/403885/meredit-brussard-iskusstvennyj-intellekt-predely-thumb.webp)






Обсуждение, отзывы о книге «Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres]» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.