Владимир Дьяконов - Maple 9.5/10 в математике, физике и образовании
Здесь есть возможность читать онлайн «Владимир Дьяконов - Maple 9.5/10 в математике, физике и образовании» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2006, ISBN: 2006, Издательство: СОЛОН-Пресс, Жанр: Программы, Математика, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Maple 9.5/10 в математике, физике и образовании
- Автор:
- Издательство:СОЛОН-Пресс
- Жанр:
- Год:2006
- Город:Москва
- ISBN:5-98003-258-4
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Maple 9.5/10 в математике, физике и образовании: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Maple 9.5/10 в математике, физике и образовании»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Maple 9.5/10 в математике, физике и образовании — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Maple 9.5/10 в математике, физике и образовании», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
> autonomous(sin(z(t)-z(t)^2)*(D@@4)(z)(t)-cos(z(t))-5,z,t);
> DE:=diff(x(s),s)-x(s)*cos(arctan(x(s)))=arctan(s):
> autonomous(DE,{x},s);
Ниже описание этой функции будет продолжено. Функция Dchangevar используется для обеспечения замен (подстановок) в дифференциальных уравнениях:
Dchangevar(trans, deqns, с_ivar, n_ivar)
Dchangevar(tran1, tran2, ..., tranN, deqns, с_ivar, n_ivar)
В первом случае trans — список или множество уравнений, которые подставляются в дифференциальное уравнение, список или множество дифференциальных уравнений deqns. При этом civar — имя текущей переменной, n_ivar — имя новой переменной (его задавать необязательно). Во второй форме для подстановки используются уравнения tran1, tran2, …
Ниже представлены примеры применения функции Dchangevar
# Преобразование 1-го типа
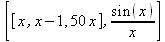
> Dchangevar(m(х) = l(х)*sin(x), n(x)=k(x), [D(m)(x)=m(x), (D@@2)(n)(x)=n(x)^2], x);
> Dchangevar(c=d, е=sin(f) , {D(с), (D@@2)(e)}, dummy);
# Преобразование 2-го типа
> Dchangevar(t=arctan(tau), diff(x(t), t) = sin(t), t, tau);
> Dchangevar(x=sin(cos(t)),diff(y(x),x,x,x), x, t);
# Преобразование 3-го типа
> Dchangevar(x(t)=L*y(phi),diff(x(t),t$3) = tan(t),t,phi);
# Дополнительные примеры
> Dchangevar({t=T*phi,x(t)=L*y(phi)},diff(x(t)), t$3)=tan(t),t,phi);
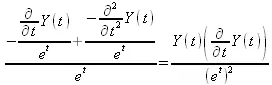
> de := diff(y(x),x$2) = y(x)*diff(y(x),x)/x;
> Dchangevar({x=exp(t), y(x)=Y(t)},de,x,t);
Следует отметить, что подстановки являются мощным средством решения дифференциальных уравнений. Нередки случаи, когда дифференциальное уравнение не решается без их применения.
Функция нормализации ОДУ DEnormal синтаксически записывается в виде
DEnormal(des, ivar, dvar)
где des — система дифференциальных уравнений, ivar — независимая переменная и dvar — зависимая переменная. Применение этой функции поясняют следующие примеры:
> DE := х^3*у(х)+х^2*(х-1)*D(y)(х)+50*х^3*(D@@2)(y)(x)=x*sin(x);
> DE2 := convertAlg(DE,y(x));
> DEnormal(DE,x,y(x));

> DEnormal(DE2,х);
Функция convertAlg(des,dvar) возвращает список коэффициентов формы системы дифференциальных уравнений des с зависимыми переменными dvar. Это поясняют следующие примеры:
> А : = diff(y(х),х)*sin(х) - diff(y(х),х) - tan(х)*y(х) = 5;

> convertAlg(А,y(х));
> В := (D@@2)(y)(х)*cos(x) + (D@@2)(y)(х)*5*х^2;
> convertAlg(В,y(x));
Для изменения переменных в системах дифференциальных уравнений используется функция convertsys:
convertsys(deqns, inits, vars, ivar, yvec, ypvec)
Здесь deqns — одно дифференциальное уравнение или список (множество), представляющие систему дифференциальных уравнений первого порядка, inits — множество или список начальных условий, vars — зависимые переменные, ivar — независимые переменные, yvec — вектор решений и ypvec — вектор производных.
indicialeq(des,ivar,alpha,dvar)
обеспечивает полиномиальное представление для линейного однородного дифференциального уравнения второго порядка des. Параметр alpha намечает точку сингулярности.
> Y : =
(2*х^2+5*х^3)*diff(y(х),х,х)+(5*х-х^2)*diff(y(х),х)+(1+х)*y(х)=0:
> Y := convertAlg(Y, y(х));
> indicialeq(Y, х, -2/5, y(х));

> indicialeq(Y, x, 0, y(x));
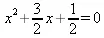
> indicialeq(Y, х, 1, y(х));
Интервал:
Закладка:
Похожие книги на «Maple 9.5/10 в математике, физике и образовании»
Представляем Вашему вниманию похожие книги на «Maple 9.5/10 в математике, физике и образовании» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Maple 9.5/10 в математике, физике и образовании» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.