Монк - Программируем Arduino. Профессиональная работа со скетчами.
Здесь есть возможность читать онлайн «Монк - Программируем Arduino. Профессиональная работа со скетчами.» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: СПб., Год выпуска: 2017, ISBN: 2017, Издательство: Издательский дом Питер, Жанр: Программирование, Компьютерное железо, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Программируем Arduino. Профессиональная работа со скетчами.
- Автор:
- Издательство:Издательский дом Питер
- Жанр:
- Год:2017
- Город:СПб.
- ISBN:978-5-496-02385-6
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Программируем Arduino. Профессиональная работа со скетчами.: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Программируем Arduino. Профессиональная работа со скетчами.»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Простые проекты на основе Arduino не вызывают сложностей в реализации. Но, вступив на территорию, не охваченную вводными руководствами, и увеличивая сложность проектов, вы быстро столкнетесь с проблемой нехватки знаний — врагом всех программистов.
Эта книга задумана как продолжение бестселлера «Programming Arduino: Getting Started with Sketches». Несмотря на то что эта книга включает краткое повторение основ из книги «Programming Arduino», она познакомит читателя с более продвинутыми аспектами программирования плат Arduino.
Программируем Arduino. Профессиональная работа со скетчами. — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Программируем Arduino. Профессиональная работа со скетчами.», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
// sketch 03_02_interrupt_flash
int ledPin = 13;
volatile boolean flashFast = false;
void setup()
{
pinMode(ledPin, OUTPUT);
attachInterrupt(0, stuffHapenned, FALLING);
}
void loop()
{
int period = 1000;
if (flashFast) period = 100;
digitalWrite(ledPin, HIGH);
delay(period);
digitalWrite(ledPin, LOW);
delay(period);
}
void stuffHapenned()
{
flashFast = ! flashFast;
}
В этом скетче функция loop использует глобальную переменную flashFast, чтобы определить период задержки. Подпрограмма обработки изменяет значение этой переменной между true и false.
Обратите внимание на то, что в объявление переменной flashFast включено слово volatile. Вы можете успешно разрабатывать скетч и без спецификатора volatile, но он совершенно необходим, потому что в отсутствие этого спецификатора компилятор C может генерировать машинный код, кэширующий значение переменной в регистре для увеличения производительности. Если, как в данном случае, кэширующий код будет прерван, он может не заметить изменения значения переменной.
В заключение о подпрограммах обработки прерываний
Когда будете писать подпрограммы обработки прерываний, помните следующие правила.
• Подпрограммы должны действовать быстро.
• Для передачи данных между подпрограммой обработки прерываний и остальной программой должны использоваться переменные, объявленные со спецификатором volatile.
• Не используйте delay, но можете использовать delayMicroseconds.
• Не ожидайте высокой надежности взаимодействий через последовательные порты.
• Не ожидайте, что значение, возвращаемое функцией millis, изменится.
Разрешение и запрет прерываний
По умолчанию прерывания в скетчах разрешены и, как упоминалось ранее, автоматически запрещаются на время работы подпрограммы обработки прерываний. Однако есть возможность явно запрещать и разрешать прерывания в программном коде, вызывая функции noInterrupts и interrupts. Эти функции не имеют параметров, и первая из них запрещает прерывания, а вторая — разрешает.
Явное управление может понадобиться, чтобы исключить возможность прерывания фрагмента кода, например, выводящего последовательность данных или генерирующего последовательность импульсов и точно выдерживающего временные интервалы с помощью функции delayMicroseconds.
Прерывания от таймера
Вызов подпрограмм обработки прерываний можно организовать не только по внешним событиям, но и по внутренним событиям изменения времени. Такая возможность особенно полезна, когда требуется выполнять некоторые операции через определенные интервалы времени.
Библиотека TimerOne упрощает настройку прерываний от таймера. Ее можно найти и загрузить по адресу http://playground.arduino.cc/Code/Timer1.
Следующий пример показывает, как с помощью TimerOne сгенерировать последовательность импульсов прямоугольной формы с частотой 1 кГц. Если в вашем распоряжении имеется осциллограф или мультиметр с возможностью измерения частоты, подключите его к контакту 12, чтобы увидеть сигнал (рис. 3.2).
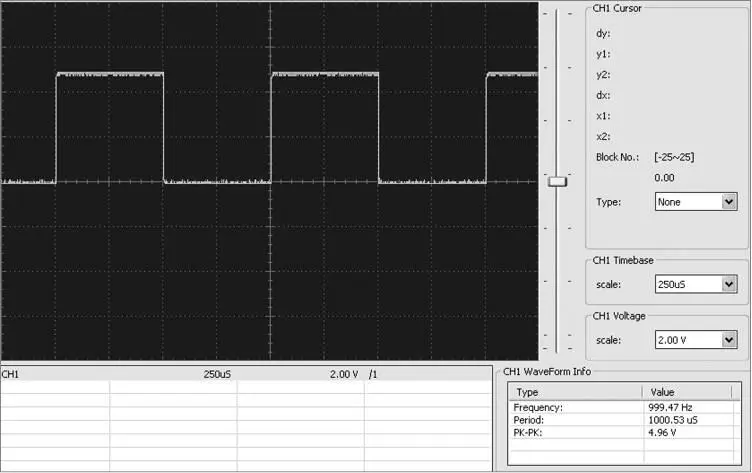
Рис. 3.2.Последовательность прямоугольных импульсов, сгенерированная с помощью таймера
// sketch_03_03_1kHz
#include
int outputPin = 12;
volatile int output = LOW;
void setup()
{
pinMode(12, OUTPUT);
Timer1.initialize(500);
Timer1.attachInterrupt(toggleOutput);
}
void loop()
{
}
void toggleOutput()
{
digitalWrite(outputPin, output);
output = ! output;
}
То же самое можно было бы реализовать с помощью delay, но применение прерываний от таймера позволяет организовать выполнение любых других операций внутри loop. Кроме того, использование функции delay не позволит добиться высокой точности, потому что время, необходимое на изменение уровня напряжения на контакте, не будет учитываться в величине задержки.
ПРИМЕЧАНИЕ
Все ограничения для подпрограмм обработки внешних прерываний, о которых рассказывалось ранее, распространяются также на подпрограммы обработки прерываний от таймера.
Представленным способом можно установить любой интервал между прерываниями в диапазоне от 1 до 8 388 480 мкс, то есть примерно до 8,4 с. Величина интервала передается функции initialize в микросекундах.
Библиотека TimerOne дает возможность также использовать таймер для генерирования сигналов с широтно-импульсной модуляцией (Pulse Width Modulation, PWM) на контактах 9 и 10 платы. Это может показаться излишеством, потому что то же самое делает функция analogWrite, но применение прерываний позволяет обеспечить более точное управление сигналом PWM. В частности, используя такой подход, можно организовать измерение протяженности положительного импульса в диапазоне 0…1023 вместо 0…255 в функции analogWrite. Кроме того, при использовании analogWrite частота следования импульсов в сигнале PWM составляет 500 Гц, а с помощью TimerOne можно эту частоту увеличить или уменьшить.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Программируем Arduino. Профессиональная работа со скетчами.»
Представляем Вашему вниманию похожие книги на «Программируем Arduino. Профессиональная работа со скетчами.» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Программируем Arduino. Профессиональная работа со скетчами.» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.