Виталий Ткаченко - Обратные вызовы в C++
Здесь есть возможность читать онлайн «Виталий Ткаченко - Обратные вызовы в C++» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2021, Издательство: Array SelfPub.ru, Жанр: Программирование, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Обратные вызовы в C++
- Автор:
- Издательство:Array SelfPub.ru
- Жанр:
- Год:2021
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Обратные вызовы в C++: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Обратные вызовы в C++»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Обратные вызовы в C++ — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Обратные вызовы в C++», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
В общем случае существуют две модели обработки ошибок: анализ кодов возврата и использование исключений. Несмотря на то, что использование исключений в последнее время подвергается серьезной критике, вплоть до того, что в новых языках программирования от них избавляются, в C++ указанный механизм остается востребованным, и мы также им воспользуемся. Объявления для формирования исключений представлены в Листинг 87.
namespace sensor
{
enum class SensorError: uint32_t // (1)
{
NoError = 0,
NotInitialized = 1,
UnknownSensorType = 2,
UnknownSensorNumber = 3,
SensorIsNotOperable = 4,
DriverIsNotSet = 5,
InvalidArgument = 6,
NotSupportedOperation = 7,
InitDriverError = 8
};
class sensor_exception : public std::exception // (2)
{
public:
sensor_exception(SensorError error);
SensorError code() const;
virtual const char* what() const;
static void throw_exception(SensorError error); // (3)
private:
SensorError code_;
};
}; //namespace sensor
В строке 1 объявлены коды возможных ошибок, в строке 2 объявлен класс исключений. Если при выполнении где-то в коде возникает ошибка, то в этом месте нужно вызвать метод, объявленный в строке 3. Указанный метод выбросит исключение с соответствующим кодом.
6.2.3. Драйвер
Драйвер предназначен для взаимодействия с аппаратным обеспечением. Класс, представляющий обобщенный интерфейс для работы с драйвером, приведен в Листинг 88.
namespace sensor
{
class IDriver
{
public:
virtual void initialize() = 0; // (1)
virtual void activate(SensorNumber number) = 0; // (2)
virtual bool isOperable(SensorNumber number) = 0; // (3)
virtual SensorValue readSpot(SensorNumber number) = 0; // (4)
virtual SensorValue readSmooth(SensorNumber number) = 0; // (5)
virtual SensorValue readDerivative(SensorNumber number) = 0; // (6)
virtual ~IDriver() = default;
static DriverPointer createDriver(DriverType type); // (7)
};
}; //namespace sensor
В строке 1 объявлен метод для инициализации драйвера. В строке 2 объявлен метод для активации датчика. В строке 3 объявлен метод, возвращающий признак работоспособности датчика. В строках 4, 5 и 6 объявлены методы для чтения соответственно текущих, сглаженных и производных значений. Метод в строке 7 представляет собой фабрику классов, в котором происходит создание класса соответствующего типа.
От общего интерфейса наследуются классы, реализующие драйверы различных типов. В нашей системе реализованы три типа драйверов: драйвер для работы с шиной USB; драйвер для работы через сеть Ethernet; имитируемый драйвер. Диаграмма классов изображена на Рис. 28.
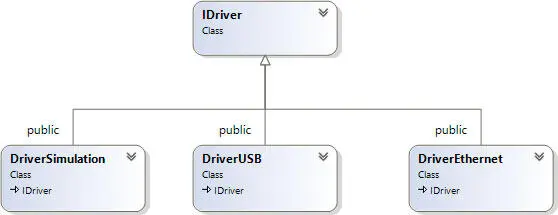
Рис. 28. Диаграмма классов, реализующих драйверы
Драйверы для работы с физическими устройствами формируют команды, посылают их через соответствующие протоколы и возвращают результаты. Реализацию этих драйверов мы рассматривать не будем, поскольку работа с hardware – это отдельная тема, для изучения которой требуется не одна книга. Для нас представляет интерес реализация имитируемого драйвера.
Очевидно, что имитируемый драйвер должен возвращать заранее заданные значения. Самое простое решение, лежащее на поверхности, заключается в том, чтобы хранить эти значения в глобальных или статических переменных и возвращать их в соответствующих методах. Однако в этом случае имитация будет очень примитивной: для всех датчиков будет возвращаться одно и то же значение. Можно хранить свое возвращаемое значение в каждом классе датчика, что больше похоже на работу в реальной системе, но это также не лишено недостатков: мы не можем моделировать изменения показателей в динамике. Лучшим решением было бы предоставить возможность пользователю возвратить значение в момент запроса, для чего нам, конечно же, понадобится обратный вызов. Обратный вызов будет использоваться по схеме «Запрос данных» (см. п. 1.2.1).
Итак, для реализации интерфейса имитируемого драйвера нам понадобятся дополнительные методы и определения (см. Листинг 89).
class DriverSimulation : public IDriver
{
public:
enum ReadType { READ_SPOT = 0, READ_SMOOTH = 1, READ_DERIVATIVE = 2 }; // (1)
using OnReadValue = std::function; // (2)
using OnOperable = std::function; // (3)
void initialize() override;
void activate(SensorNumber number) override;
Интервал:
Закладка:
Похожие книги на «Обратные вызовы в C++»
Представляем Вашему вниманию похожие книги на «Обратные вызовы в C++» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Виталий Зыков - Обратная сторона Власти [СИ]](/books/431577/vitalij-zykov-obratnaya-storona-vlasti-si-thumb.webp)


Обсуждение, отзывы о книге «Обратные вызовы в C++» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.