Олег Цилюрик - QNX/UNIX - Анатомия параллелизма
Здесь есть возможность читать онлайн «Олег Цилюрик - QNX/UNIX - Анатомия параллелизма» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2006, ISBN: 2006, Издательство: Символ-Плюс, Жанр: Программирование, ОС и Сети, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:QNX/UNIX: Анатомия параллелизма
- Автор:
- Издательство:Символ-Плюс
- Жанр:
- Год:2006
- Город:Санкт-Петербург
- ISBN:5-93286-088-Х
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
QNX/UNIX: Анатомия параллелизма: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «QNX/UNIX: Анатомия параллелизма»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
В качестве «испытательной площадки» для тестовых фрагментов выбрана ОСРВ QNX, что позволило с единой точки зрения взглянуть как на специфические механизмы микроядерной архитектуры QNX, так и на универсальные механизмы POSIX. В этом качестве книга может быть интересна и тем, кто не использует (и не планирует никогда использовать) ОС QNX: программистам в Linux, FreeBSD, NetBSD, Solaris и других традиционных ОС UNIX.
QNX/UNIX: Анатомия параллелизма — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «QNX/UNIX: Анатомия параллелизма», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
• до запуска обсуждаемого приложения:
4/366186 1 /photon/bin/phcalc 10r REPLY 241691
• и после его завершения:
54652947 1 bin/pidin 10r REPLY 1
Легко видеть, что разница PID, равная 54652947 – 47366186 = 7286761, никак не является числом активированных на этом временном промежутке процессов, которое равно 1743. Поэтому к численным значениям PID нужно относиться с заметной осторожностью: это не просто инкрементированное значение числа запущенных процессов, схема формирования PID заметно сложнее.
В любом случае мы можем принять, что в ОС QNX Neutrino 6.2.1, как и в других «канонических» UNIX, количество процессов (если, конечно, эта ОС не дает нам более вразумительных оценок) ограничено цифрой 4095. Видно, что общее количество независимых потоков исполнения в системе может достигать совершенно ошеломляющей цифры. Но как бы много потоков мы ни создавали, им все равно придется конкурировать за доступ к самому главному ресурсу — процессору. В настоящее время реализованные в QNX дисциплины диспетчеризации работают над суммарным полем всех потоков в системе (рис. 2.1): если в системе выполняется N процессов и i- й процесс реализует M i потоков, то в очередях диспетчеризации одновременно задействовано  управляемых объектов (потоков).
управляемых объектов (потоков).
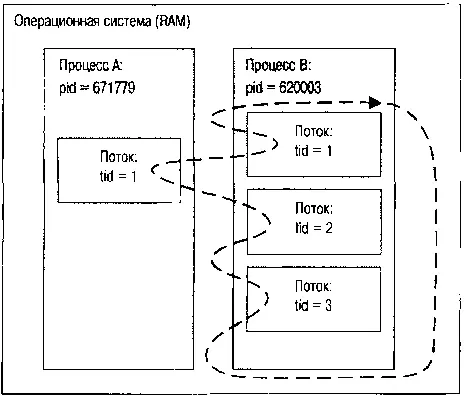
Рис. 2.1. Диспетчеризация процессов
На рис. 2.1 изображены два процесса, выполняющиеся под управлением системы. Каждый процесс создал внутри себя различное количество потоков равного приоритета. Обратите внимание, что фактическая диспетчеризация производится не между процессами, а между потоками процессов, даже если иногда для простоты говорят «диспетчеризация процессов». Потоки объединены в циклическую очередь диспетчеризации, и пунктирная линия показывает порядок, в котором (в направлении стрелки) они будут поочередно получать квант времени.
Если ни один из потоков не будет выполнять блокирующих операций ( read(), delay(), accept(), MsgSend()и множество других), что реально встречается крайне редко, то показанный порядок «следования» потоков при диспетчеризации будет сохраняться неограниченно долго. Как только поток выполнит блокирующий вызов, он будет удален из очереди готовых к выполнению потоков, а после завершения вызова возвращен в очередь, причем (что характерно!) в голову очереди. После этого топология «петли» (порядок чередования), показанной на рисунке пунктиром, может произвольным образом измениться.
Из рисунка хорошо видно, что при диспетчеризации «в рамках системы» (об этом мы будем говорить позже) два запущенных процесса будут выполняться в неравных условиях: на каждый полный цикл диспетчеризации программный код, выполняющийся в рамках процесса А, будет получать 1 квант времени, а код в процессе B — 3 кванта.
Стандарт POSIX, определяя названную стратегию диспетчеризации константой PTHREAD_SCOPE_SYSTEM, предусматривает и другую стратегию, обозначаемую константой PTHREAD_SCOPE_PROCESS, когда потоки конкурируют за процессорный ресурс в пределах процесса, к которому они принадлежат (в Sun Solaris первой стратегии соответствуют «bound thread», а второй — «unbound thread»). Реализация стратегии PTHREAD_SCOPE_PROCESSсвязана с серьезными трудностями. Насколько нам известно, в настоящее время из числа широко распространенных ОС она реализована только в Sun Solaris. В QNX для совместимости с POSIX даже присутствуют системные вызовы относительно стратегии диспетчеризации:
int pthread_attr_setscope(pthread_attr_t* attr, int scope);
int pthread_attr_getscope(const pthread_attr_t* attr, int* scope);
но в качестве параметра scope они допускают... только значение PTHREAD_SCOPE_SYSTEMи на поведение потоков никакого влияния не оказывают.
PID (Process ID) — идентификатор процесса, присваиваемый процессу при его создании, например вызовом fork(). PID позволяет системе однозначно идентифицировать каждый процесс. При создании нового процесса ему присваивается первый свободный (то есть не ассоциированный ни с каким процессом) идентификатор. Присвоение происходит по возрастающей: идентификатор нового процесса больше идентификатора процесса, созданного перед ним. Когда последовательность идентификаторов достигает максимального значения (4095), следующий процесс получает минимальный свободный (за счет завершившихся процессов) PID, и весь цикл повторяется снова. Значения PID нумеруются, начиная с 0. Процесс, загружавший ОС, является родительским для всех процессов в системе и его PID = 0.
Интервал:
Закладка:
Похожие книги на «QNX/UNIX: Анатомия параллелизма»
Представляем Вашему вниманию похожие книги на «QNX/UNIX: Анатомия параллелизма» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «QNX/UNIX: Анатомия параллелизма» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.