Компьютерра - Журнал «Компьютерра» № 6 от 14 февраля 2006 года
Здесь есть возможность читать онлайн «Компьютерра - Журнал «Компьютерра» № 6 от 14 февраля 2006 года» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Прочая околокомпьтерная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Журнал «Компьютерра» № 6 от 14 февраля 2006 года
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Журнал «Компьютерра» № 6 от 14 февраля 2006 года: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Журнал «Компьютерра» № 6 от 14 февраля 2006 года»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Журнал «Компьютерра» № 6 от 14 февраля 2006 года — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Журнал «Компьютерра» № 6 от 14 февраля 2006 года», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
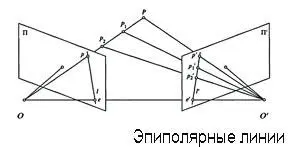
После того как взаимное положение камер известно, можно для любой точки одного изображения найти прямую на другом, которая будет проходить через точку, соответствующую в пространстве первой. Эта прямая называется эпиполярной и соответствует проекции (e’p’, см. рис. справа внизу) на вторую камеру прямой (OP), соединяющей точку в пространстве (P) с оптическим центром первой камеры (O). Понятно, что конфигурация эпиполярных линий определяется только параметрами пары камер и не зависит от конфигурации 3D-сцены.
После того как построены эпиполярные линии, мы можем искать точку, соответствующую данной, не по всему второму изображению, а только вдоль эпиполярной прямой, что не только сильно снижает вычислительную сложность алгоритма, но и позволяет находить такие соответствия, которые другими методами просто были бы пропущены.
Вернемся к примеру с кубом. Пусть у нас уже построены эпиполярные линии и найдены соответствия между вершинами и гранями куба. Теперь мы можем для любой точки на грани куба найти соответствие: строим эпиполярную линию, которая пересечет грань куба на втором изображении в единственном месте, оно-то и будет точкой, соответствующей первой.

Вспомним про третий инструмент человеческого восприятия трехмерного пространства — выявление знакомых предметов со знакомыми размерами. Этот метод применим только для довольно узкого класса задач. Например, индустриальный робот только и делает, что перекладывает пять различных типов заготовок с места на место и вполне может их «узнавать», а вот для ориентирования в произвольном помещении такой метод вряд ли подойдет. Знаменитый робот-собака Aibo может находить и узнавать свои игрушки, но для этого они специальным образом раскрашиваются.
Можно и с одной камерой составить представление о трехмерном мире, но для этого роботу придется двигаться и, сохраняя предыдущие кадры в памяти, использовать их аналогично кадрам со второй камеры. При таком алгоритме существенно упрощается поиск парных соответствий. Ведь если сохранять кадры часто, то на двух соседних соответствующие точки будут лежать недалеко друг от друга. Более того, если результат покажется недостаточно точным, можно продолжить движение и уточнить его.
Теперь рассмотрим возможности, которые недоступны человеку, но вполне могут быть реализованы в роботах. Существенно увеличить точность восстановления 3D можно, используя третий глаз. Именно так и поступила компания Sony, спроектировав робота Qrio. Правда, он использует третий глаз не только для ориентирования в пространстве, но и для увеличения многозадачности.
Все описанные методы являются пассивными — робот не генерирует никаких сигналов. Существуют также и активные системы; некоторые из них сродни эхолотам дельфинов и акустическим радарам летучих мышей. Робот посылает направленную акустическую или электромагнитную волну и по отраженной волне, которую сам и принимает, получает информацию о расстоянии до преграды. Такой аппаратурой обычно оснащаются роботы, действующие на открытой местности, где оптические методы не всегда эффективны (выбрать соответствующие друг другу точки очень трудно из-за сложной формы объектов и обилия сильно текстурированных областей).
Рассмотрим системы с оптической подсветкой. Если установить на робота одну камеру и лазер, который создает яркое пятнышко на поверхности предметов, то по скорости перемещения пятна можно судить о дистанции до предмета, а по ускорению — о наклоне поверхности (при наличии двух или более камер). Таким образом, можно «прощупать» лазером все поле зрения робота. Но согласитесь, многим не понравится, если механический курьер в офисе будет всюду шарить лазером. Впрочем, можно взять лазер, излучающий в невидимом диапазоне. Еще более изящное решение — использовать структурированную подсветку. Все поле зрения робота засвечивается лазерной решеткой, и расстояние до преграды определяется по шагу решетки на кадре: чем он больше — тем и расстояние больше. Такие системы не смогут работать с зеркальными поверхностями, но согласитесь, что в стеклянном лабиринте не сможет сориентироваться даже человек, поэтому всерьез этот недостаток воспринимать не следует.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Журнал «Компьютерра» № 6 от 14 февраля 2006 года»
Представляем Вашему вниманию похожие книги на «Журнал «Компьютерра» № 6 от 14 февраля 2006 года» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Журнал «Компьютерра» № 6 от 14 февраля 2006 года» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.