Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С
Здесь есть возможность читать онлайн «Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Издательский дом «ДМК-пресс», Жанр: Компьютерное железо, Программирование, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С
- Автор:
- Издательство:Издательский дом «ДМК-пресс»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0034-2
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание содержит материал, охватывающий все вопросы проектирования, включает множество заданий для самостоятельной работы, примеры программирования, примеры аппаратных решений и эксперименты по исследованию работы различных подсистем микроконтроллеров.
Данная книга является прекрасным учебным пособием для студентов старших курсов технических университетов, которые предполагают связать свою профессиональную деятельность с проектированием и внедрением встраиваемых микропроцессорных систем. Книга также будет полезна разработчикам радиоэлектронной аппаратуры на микроконтроллерах.
Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Кадр удаленного запроса используется принимающими узлами, чтобы запросить повторную передачу кадра данных. Кадр удаленного запроса идентичен кадру данных за исключением того, что он не содержит поля данных. Для того, чтобы принимающий узел мог отличить кадр удаленного запроса от кадра данных, в поле арбитража предусмотрен специальный бит RTR. Рецессивное состояние бита RTR (логическая 1) обозначает кадр удаленного запроса, а доминантное состояние (логический 0) — кадр данных.
Кадр ошибки, представленный на рис. 9.4, информирует узлы сети о том, что на шине CAN произошла ошибка. Каждый кадр ошибки состоит из поля признака ошибки и поля разделителя ошибки. Поле признака ошибки содержит либо активные флаги ошибки (шесть доминантных бит), либо пассивные флаги ошибки (шесть рецессивных бит). Мы дадим определение понятиям активных и пассивных ошибок в разделе обработки ошибок. Следует заметить, что в системах с многочисленными узлами на шине CAN число доминантных бит в признаке ошибки может увеличиваться до 12. Это необходимо, чтобы все компоненты системы могли использовать флаги ошибки. Поле разделителя ошибки состоит из восьми рецессивных бит.
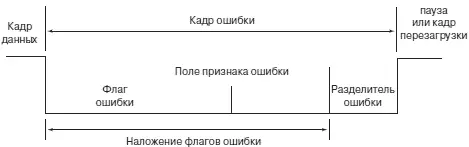
Рис. 9.4.Кадр ошибки CAN
Кадр перегрузки, как показано в рис. 9.5, имеет тот же формат, что и кадр ошибки. Флаг перегрузки составлен из шести доминантных бит. Биты флага перегрузки устанавливаются, когда:
• принимающий узел не может обработать корректные кадры за выделенное время, и требует задержки;
• на интервале паузы появился доминантный бит.
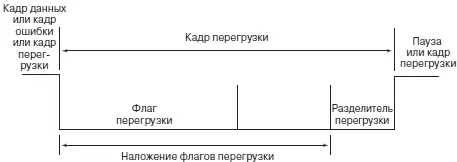
Рис. 9.5.Кадр перегрузки CAN
Кадры данных и удаленного запроса на шине CAN отделяются от других кадров интервалами паузы, которые состоят, по крайней мере, из трех рецессивных бит. Разделитель перегрузки составлен из восьми рецессивных бит.
Обработка ошибок.Во время передачи сообщения по CAN шине могут происходить ошибки. Когда активным (передающим сообщение) или пассивным (принимающим) узлом системы обнаружена ошибка, соответствующий узел выставляет на шину кадр ошибки, рассмотренный выше. Если активный узел передает кадр ошибки, флаг ошибки называется активным флагом ошибки; если ошибка зафиксирована в пассивном узле, то и флаг называется пассивным. Имеются пять типов ошибок, которые могут вызывать передачу кадра ошибки: ошибка разряда (1), ошибка заполнения (2), ошибка избыточности (3), ошибка формы (4) и ошибка подтверждения (5).
Ошибка разряда происходит, когда передающий узел обнаруживает несоответствие выставляемого на шину бита и реального состояния шины в тот же момент времени. Флаг ошибки заполнения устанавливается, когда контроллер CAN обнаруживает в передаваемом кадре шесть последовательных доминантных или шесть последовательных рецессивных бит. Ошибка контроля происходит, когда значение контрольного числа CRC, вычисленное приемником, не соответствует контрольному числу CRC, полученному в конце передачи. Ошибка формы фиксируется, когда в одном из полей кадра содержатся недопустимые биты. И наконец, ошибка подтверждения происходит, когда отсутствует доминантный бит в поле ACK-Slot.
Синхронизация бита.На рис. 9.6 показано, что интервал времени передачи одного бита по шине CAN разбивается на четыре временных сегмента: сегмент синхронизации, сегмент распространения, сегмент буфера фазы 1 и сегмент буфера фазы 2. На интервале первого сегмента появляется фронт, который используется, чтобы синхронизировать узлы, подключенные к шине. Выборка логического состояния бита производится после окончания сегмента буфера фазы 1 (точка выборки). Сегмент времени распространения учитывает задержку передатчика и приемника и время распространения сигнала по шине. Сегменты фазы 1 и 2 могут увеличиваться или уменьшаться по длительности посредством программных уставок при инициализации. Такое решение позволяет увеличить надежность передачи данных по шине.
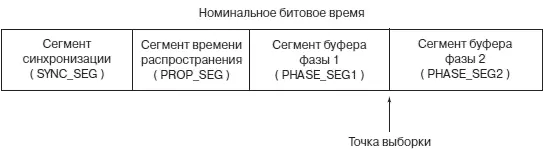
Рис. 9.6.Номинальные сегменты времени передачи бита
9.3.2. Модуль контроллера последовательного обмена msCAN12
Микроконтроллеры 68HC912BC32, 68HC912D60, 68HC912DG128 и 68HC912DT128 имеют в своем составе один или несколько встроенных контроллеров последовательного обмена в стандарте CAN. Эти контроллеры принято называть модулями msCAN (Motorola Scalable Controller Area Network). Семейство 68HC12/HCS12 отличается тем, что модели МК, входящие в его состав, оснащены сразу несколькими модулями msCAN. Например, МК 68HC912BC32 и 68HC912D60 имеют в своем составе один модуль msCAN, 68HC912DG128 — 2 модуля, 68HC912DT128 — 3 модуля, а в семействе HCS12 возможен даже вариант МК с 5 модулями «на борту».
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С»
Представляем Вашему вниманию похожие книги на «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.