Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С
Здесь есть возможность читать онлайн «Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Издательский дом «ДМК-пресс», Жанр: Компьютерное железо, Программирование, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С
- Автор:
- Издательство:Издательский дом «ДМК-пресс»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0034-2
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание содержит материал, охватывающий все вопросы проектирования, включает множество заданий для самостоятельной работы, примеры программирования, примеры аппаратных решений и эксперименты по исследованию работы различных подсистем микроконтроллеров.
Данная книга является прекрасным учебным пособием для студентов старших курсов технических университетов, которые предполагают связать свою профессиональную деятельность с проектированием и внедрением встраиваемых микропроцессорных систем. Книга также будет полезна разработчикам радиоэлектронной аппаратуры на микроконтроллерах.
Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Цель этого проекта состояла в том, чтобы разработать и изготовить автономную систему парящего робота, управляемую микроконтроллером 68HC9S12. Наиболее трудным аспектом системы является проблема стабильного положения робота, которое должно постоянно поддерживаться контроллером. На рис. 7.21 показана фотография робота на базе парящей рамы. Этот проект был создан студентом старших курсов.
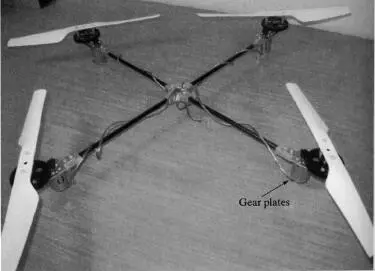
Рис. 7.21.Робот на базе парящей рамы
Чтобы обеспечить работоспособность проекта, мы должны сначала определить все требования к системе. При создании проекта необходимо решить ряд сложных проблем, в числе которых: создание прочной, но легкой летающей рамы, которая удовлетворяла бы летным требованиям, выбор и размещение датчиков, выбор привода пропеллеров, проектирование системы питания и решение задачи стабилизации положения.
Парящий робот должен удовлетворять следующим общим требованиям:
1. Быть автономным;
2. Иметь рабочую область размером 16×16 футов. (40,6×40,6 см);
3. Весить не больше, чем 2,5 фунта (1,14 кг);
4. Обладать собственными средствами взлета и посадки;
5. Использовать двигатели постоянного тока;
6. Поднимать до 4,5 фунтов (2,05 кг), включая собственный вес;
7. Поддерживать постоянную высоту парения;
8. Осуществлять движение во всех направлениях;
9. Избегать препятствий;
10. Иметь энергонезависимую память данных;
11. Стоить не более $500,00.
7.5.2. Системы HCS12 используемые в проекте
В этом проекте будут использоваться следующие под системы HCS12:
• Подсистема входного захвата таймера;
• Модуль АЦП;
• Подсистема ШИМ.
7.5.3. Теоретическое обсуждение
Для парящего робота была разработана простая воздушная рама, подобная существовавшему ранее покупному радиоуправляемому устройству, показанному на рис. 7.21. Она собрана из четырех стержней, скрепленных в центре рамы, имеющей форму креста. К каждому концу стержня прикреплен двигатель постоянного тока и механизм привода для пропеллера. Два соседних пропеллера вращаются во встречных направлениях, чтобы предотвратить рыскание рамы, при этом два пропеллера вращаются по часовой стрелке, а два других — против часовой стрелки. В обычных вертолетах встречное вращение обеспечивается хвостовым пропеллером.
Для управления использовалась T-плата компании ImageCraft с МК семейства HCS12 (рис. 7.22). Частота тактирования МК равна 25 МГц, резидентная Flash-память программ МК равна 256 Кб, оперативная память — 12 Кб и энергонезависимая память данных типа EEPROM — 4 Кб. Для бортовой схемы весьма желательна миниатюризация платы. Для управления двигателями постоянного тока используется встроенный модуль ШИМ. Пьезогирометрические датчики для трех осей вращения обеспечивают изменение углов тангажа, крена и рыскания для управления парящим роботом. Выходы гиродатчика поданы на вход таймера МК и используются, чтобы корректировать скорости вращения всех четырех двигателей парящего робота. В дополнение к гиродатчикам, на роботе установлены четыре инфракрасных датчика. Они обнаруживают преграды, когда робот приближается к стенкам или препятствиям. Выходы датчиков поданы на входной порт АЦП, их сигналы обеспечивают выбор алгоритма управления полетом, позволяющего избежать столкновений со стенками или препятствиями.
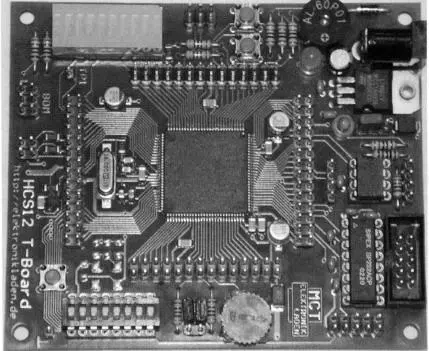
Рис. 7.22.Плата с МК НCS12
В качестве гиродатчиков используются три пьезогиродатчика GYA350 компании Futaba. Мы выбрали эти датчики, поскольку они специально предназначены для авиамоделей. Датчик весит 26 г и размещается в корпусе 27 мм×27 мм×20 мм. Он обеспечивает сигналы ШИМ частотой 55 Гц, при этом изменение ширины импульса указывает направление движения датчика и, следовательно, направление движения парящего робота. Этот гиродатчик может также работать в режиме поддержки заданного направления (режим heading-hold), при котором микроконтроллер может определить ширину импульса на выходе датчика летящего робота. При использовании функции входного захвата таймера, робот проверяет направление, оценивая выходные ШИМ сигналы гиродатчиков.
В дополнение к гиродатчикам робот использует для измерения расстояния четыре инфракрасных пары передатчик/приемник GP2D12 фирмы Sharp, чтобы избежать столкновения с любыми объектами. Эти датчики могут обеспечивать диапазон выходных напряжений, соответствующих расстоянию обнаружения от 10 до 80 см. Эти напряжения преобразуются в соответствующие цифровые значения с помощью модуля ATD микроконтроллера. Датчик легок и размещается в корпусе 45 мм×14 мм×20 мм.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С»
Представляем Вашему вниманию похожие книги на «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.