John Crisp - Introduction to Microprocessors and Microcontrollers
Здесь есть возможность читать онлайн «John Crisp - Introduction to Microprocessors and Microcontrollers» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2004, ISBN: 2004, Издательство: Elsevier, Жанр: Компьютерное железо, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Introduction to Microprocessors and Microcontrollers
- Автор:
- Издательство:Elsevier
- Жанр:
- Год:2004
- ISBN:0-7506-5989-0
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Introduction to Microprocessors and Microcontrollers: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Introduction to Microprocessors and Microcontrollers»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Introduction to Microprocessors and Microcontrollers — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Introduction to Microprocessors and Microcontrollers», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Quiz time 12
In each case, choose the best option.
1 SIMD is:
(a) used in standard Pentiums but not in the MMX versions.
(b) a way of preventing wraparound.
(c) single in-line multimedia data.
(d) single instruction multiple data.
2 Branch prediction logic:
(a) is another name for the prefetch register.
(b) is only used in MMX versions.
(c) saves memory in 85% of occasions.
(d) attempts to guess the future steps to be taken by a program.
3 An exception:
(a) will be ignored if the I flag is set to a high level.
(b) is an unusual branching of the program.
(c) is an interrupt signal generated by the microprocessor.
(d) occurs whenever the Pentium is surprised by an arithmetic result.
4 The initials SIMD stand for:
(a) SIM card type D.
(b) Single Instruction Multiple Data.
(c) Superscalar Instruction Mode for Data.
(d) Streaming Instructions Modular Data.
5 In its construction, the Pentium 4 uses:
(a) 0.13 µm technology.
(b) 1.8 µm technology.
(c) 1.3 µm technology.
(d) 0.18 µm technology.
13. The PowerPC
Intel was producing a series of CISC microprocessors and, together with Microsoft, was in a position to dominate the market. Being increasingly squeezed out was the traditional king of computers, IBM, which, at one time, produced more computers that all other manufacturers combined. Big Blue as IBM was called, on account of their logo and the blue suits worn by their army of salesmen, laid down the standard design for the computer that now eclipses all others designs in the world.
As long ago as the mid-1970s IBM had developed a RISC microprocessor but it didn’t really make it in the market place. RISC did not ‘come of age’ until Acorn produced the ARM 2 and 3 microprocessors for their Archimedes microcomputer, but this too, failed to muscle its way into the market as it made little attempt to make it compatible with Intel code. Acorn, at that time, was introducing the Archimedes as a replacement for the much-loved BBC microcomputer. By 1990, it was apparent that the terrible twins, Microsoft and Intel, would take over the world if no one fought back.
As it happens, this was the very year in which a fledgling company called ‘AMD’ was hatched to grow over the years to become a persistent irritant to Intel. As yet, Microsoft still rules the world but there is a system called Linux that may, one day, become troublesome.
Meanwhile, an alliance was formed between IBM, Motorola and Apple Computers. To this alliance IBM brought their POWER microprocessor (Performance Optimized With Enhanced RISC). This was the successor to the earlier 801 RISC microprocessor and was chosen because it was a RISC microprocessor and already had software developed. Motorola would build the chip and Apple would bring its computer operating system, which was light years ahead of the Microsoft equivalent at that time. The new family of microprocessors was to be called the PowerPC series.
The designers took great care to make it attractive to software companies by being careful to address the problem of future development. They distinguished between the overall architectural features that will stay the same throughout the series, rather than how these features will actually be implemented. This allows the programmers to know which parts they can rely on to be consistent and which bits are likely to change. For example, they designed the system for 64-bit operation even though only 32 bits were to be used in the early devices.
The PowerPC 601 was introduced in 1994 and followed the agreed PowerPC architecture as shown in Figure 13.1. It used 2.8 million transistors which is slightly less than the Pentium but many of the Pentium transistors were tied up with maintaining compatibility with their earlier microprocessors.
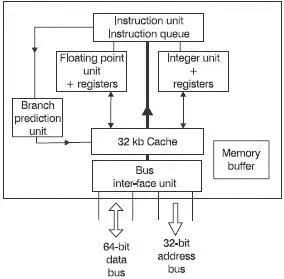
Figure 13.1 The PowerPC 601 architecture
Many of the blocks shown are familiar after our look at the Pentium. The 601 is a 32-bit microprocessor using a 64-bit data bus and a 32-bit address bus.
Bus interface unit
This serves the usual purpose of connecting the data bus and address buses to the microprocessor. It also acts as a control device to determine whether the data is to be read into the microprocessor or written into the external memory.
Cache
This is a single 32 kbyte cache which is shared by data and instructions. Later versions have increased the total cache available to provide two separate 32 kbyte caches, one for data and the other for instructions.
Within the cache, the information is arranged in a series of groups or lines of 64 bytes. To provide a high-speed link between the cache, the bus interface unit and the instruction unit and queue, a 256-bit internal bus is provided.
On many occasions, the result of a particular instruction is not of great interest in itself but just provides the data to be used for a future instruction. So when an instruction is completed, the result is stored in the cache rather than being put back into the main memory. Writing the result back into the cache is called a ‘write-back’ organization as opposed to ‘write-through’ action when the information is sent to the external memory. This, of course, saves a lot of time since the cache is about seven times faster than accessing the main memory and a million times faster than using the hard drive.
Instruction queue and instruction unit
The fast internal bus maintains a queue of up to eight instructions. Using the normal RISC ideas, all the instructions are the same length at 32 bits. Eight such instructions can fit across the 256-bit width of the internal bus.
The function of the instruction unit is to send instructions to the three pipelines: integer unit, floating-point unit and the branch prediction unit. With the right mixture of instructions, we can handle three instructions at the same time. To keep the pipelines busy, it also has the facility of running some of the instruction out of order. This is limited to instructions that are not interdependent.
The branch prediction unit
In the Pentium, the branch prediction included analysis of the history of each branch or jump instruction to help predict whether it is likely to be taken. The PowerPC uses a single stage pipeline which decodes and executes in a single clock cycle employing a very much simpler strategy that curiously seems to work just as well.
It makes no choices. If the branch is sending the program back to an earlier instruction, it always assumes that the branch will be taken. This is usually the correct choice since such loops in programs are very common. On the other hand, if the branch instruction offers the chance to jump forward, it assumes the branch will not be taken. If the predictions are correct, instructions are pre-fetched and loaded into the instruction queue and the correct data is available in the pipelines and no delay is experienced. If incorrect, the pipeline has to be flushed and reloaded losing several clock cycles.
In the case of unconditional jumps, the program just tells the microprocessor to move to another section of the program and no choice is involved. If the jump is to a distant address, the relevant instructions may not be in the cache and the cache would have to be flushed (re-loaded) (see Figure 13.2).
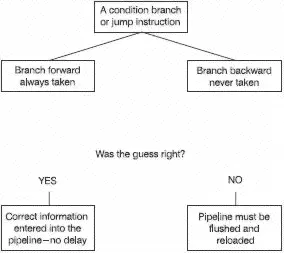
Figure 13.2 Branch prediction
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Introduction to Microprocessors and Microcontrollers»
Представляем Вашему вниманию похожие книги на «Introduction to Microprocessors and Microcontrollers» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Introduction to Microprocessors and Microcontrollers» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.