Владимир Петров - Законы и закономерности развития систем. Книга 4
Здесь есть возможность читать онлайн «Владимир Петров - Законы и закономерности развития систем. Книга 4» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. ISBN: , Жанр: popular_business, Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Законы и закономерности развития систем. Книга 4
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:9785005163738
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Законы и закономерности развития систем. Книга 4: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Законы и закономерности развития систем. Книга 4»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Законы и закономерности развития систем. Книга 4 — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Законы и закономерности развития систем. Книга 4», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
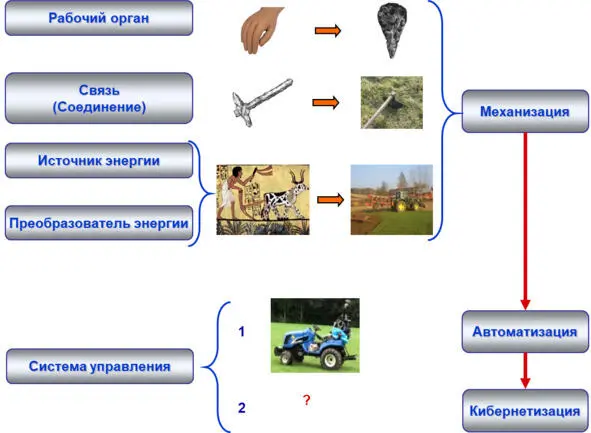
Рис. 22.16. Схема закономерности уменьшения участия человека в работе системы
22.2.3. Управляемая система
Автоматическое управление 4 4 Автоматическое управление – БСЭ http://slovar.cc/enc/bse/1970183.html .
в технике – совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления.
Цель управления – это изменение выходной величины управляемого объекта.
Тенденция перехода от неуправляемой к управляемой системе показана на рис. 22.17. Она представляет собой:
Переход от неуправляемой системы к управлению по разомкнутому контуру, затем к переходу к системе с обратной связью, к адаптивной (самонастраивающейся) системе, к самообучаемой и самоорганизующейся системе и, наконец, к саморазвивающейся и самовоспроизводящей системе.
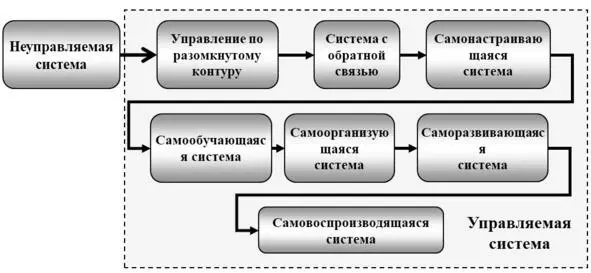
Рис. 22.17.Переход от неуправляемой системы к управляемой
Управление по разомкнутому контуруосуществляется без знаний о текущем состоянии об управляемом объекте. При таком управлении чаще всего управление ведется по жесткой программе, без анализа каких-либо факторов в процессе работы, либо измеряют и компенсируют главные из возмущений.
Для этого вида управления характерно отсутствие обратной связи, с помощью которой можно получить информацию о том, что происходит в объекте управления.
Структурная схема системы управления по разомкнутому контуру показана на рис. 22.18. Устройство управления воздействует на объект управления по программе, находящейся в задающем устройстве. На объект управления могут воздействовать возмущения. Некоторые системы по разомкнутому циклу измеряют главные из возмущений и компенсируются.
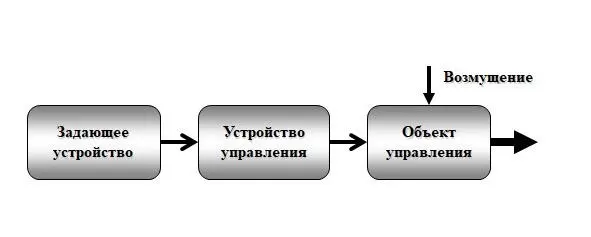
Рис. 22.18.Система управления по разомкнутому контуру
Этот вид управления достаточно примитивен, но часто исполнительные устройства просты, надежны и дешевы. По такому принципу работают примитивные автоматы и конвейерные линии.
Условия предпочтения управления по разомкнутому контуру управлению по замкнутому контуру:
– не нужны высокоточные операции;
– система может работать удовлетворительно без гарантии изменений, которые происходят в объекте управления.
Приведем примеры систем, работающих по разомкнутому циклу.
Пример 22.7. Стиральная машина
Переключение команд в стиральной машине осуществляется по определенной программе.
Пример 22.8. Сильфон
В сильфоне (рис. 22.19), заполненном жидкостью, входным сигналом является теплота. Жидкость и окружающая ее оболочка вместе с сильфоном представляют собой датчик и усилитель.
Выход системы – это стержень или подвижный рычаг.
Существенным для этой системы является довольно высокие значения движущей силы и длинный ход, который можно получить на выходе: обычный показатель – от полу килограмма до нескольких килограммов в зависимости от размера сильфона. А ход может изменяться в диапазоне от миллиметров до нескольких сантиметров. По сути, это практичный вариант исполнительного устройства с прямым линейным приводом без двигателей или электроэнергии.
Сравнивая схему управления и устройство системы, наглядно видно, что сильфон является физическим представлением системы управления по разомкнутому контуру.
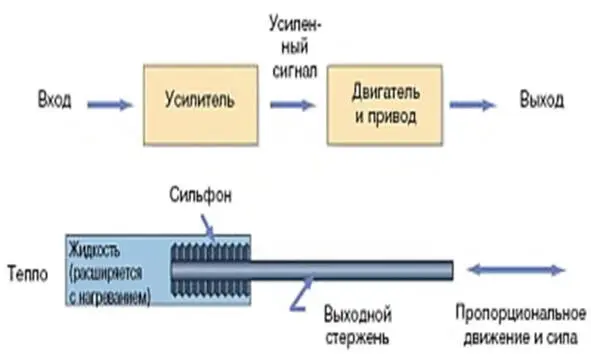
Рис. 22.19.Сильфон
Пример 22.9. Система прижатия полупроводниковой пластины
Для прижатия полупроводниковой пластины во время обработки используют сильфон (рис. 22.20). Он растягивается и сжимается по мере изменения давления, находясь в одном из двух состояний – сжатом или растянутом. Обработка пластины ведется в вакууме, сильфон растягивается, выдвигая зажим, который прижимает пластину. Когда камера открывается, в ней оказывается атмосферное давление, сильфон сжимается, отодвигая зажим и высвобождая пластину.
Это система работает по разомкнутому контуру. В ней нет обратной связи, чтобы удостовериться, что зажим был приведен в действие. Исключена необходимость размещения внутри камеры датчиков, приводов и устройства вывода из нее подводов. Система проста и надежна.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Законы и закономерности развития систем. Книга 4»
Представляем Вашему вниманию похожие книги на «Законы и закономерности развития систем. Книга 4» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Законы и закономерности развития систем. Книга 4» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.