Майк Кон - Agile - оценка и планирование проектов
Здесь есть возможность читать онлайн «Майк Кон - Agile - оценка и планирование проектов» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2018, ISBN: 2018, Издательство: Альпина Паблишер, Жанр: popular_business, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Agile: оценка и планирование проектов
- Автор:
- Издательство:Альпина Паблишер
- Жанр:
- Год:2018
- Город:Москва
- ISBN:978-5-9614-5208-2
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Agile: оценка и планирование проектов: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Agile: оценка и планирование проектов»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Майк Кон, гуру в области Agile, дает инструменты, необходимые для оценки, планирования и управления Agile-проектами любого масштаба. В книге нет теоретических рассуждений, она полна конкретных примеров, методов, графиков, рецептов, а главное — аргументированных рекомендаций.
Agile: оценка и планирование проектов — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Agile: оценка и планирование проектов», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Опережающее планирование
Большинство команд с умеренно сложным или частым взаимодействием выигрывают от создания скользящего перспективного окна во время планирования релиза и итерации. Предположим, что две команды работают над приложением SwimStats. В определенной мере приложение связано с отображением статичной информации, такой как время тренировки, адреса и маршруты подъезда к бассейнам. Однако на SwimStats должна также отображаться динамическая информация из базы данных, в том числе результаты всех соревнований за последние 15 лет и индивидуальные достижения всех пловцов во всех заплывах.
Информация по национальным рекордам и рекордам по возрастным группам хранится в базе данных на удаленном объекте национальной ассоциации по плаванию. Доступ к этой базе данных не так прост, как хотелось бы командам, и национальная ассоциация собирается сменить поставщиков баз данных в ближайший год-два. По этой причине владелец продукта и команды разработчиков согласились с тем, что нужно разработать API (интерфейс прикладного программирования) для доступа к базе данных. Это должно значительно упростить переход к другому поставщику баз данных. Первоначальные пользовательские истории и их оценки приведены в табл. 18.1.
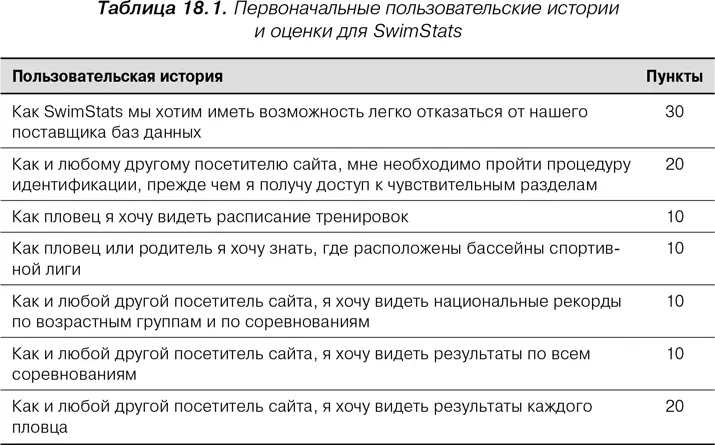
Скорость оценивается как 20 пунктов на итерацию для одной и другой команды. Поскольку объем работ составляет 110 пунктов, команды должны поставить полную функциональность за три итерации. Вместе с тем 30 пунктов приходятся на разработку API, а еще 40 пунктов (три последние истории в табл. 18.1) можно реализовать только после разработки API. Это приводит к такому распределению работ, которое представлено на рис. 18.1, где взаимозависимость команд обозначена стрелкой между реализацией API первой командой и работой над индивидуальными результатами, выполняемой второй командой.

Возможно, вы помните, что в главе 13 «Основные аспекты планирования релиза» я рекомендовал показывать в плане релиза детали только следующих двух итераций. Объясняется это тем, что такой подход нередко достаточен для поддержки взаимозависимостей, с которыми имеют дело многие команды. Когда нескольким командам приходится работать вместе, план релиза следует обновлять с тем, чтобы показывать и координировать работу в следующих двух или трех итерациях. Точное число итераций, конечно, зависит от частоты и серьезности взаимодействий команд. После завершения итераций связанные с ними детали удаляют из плана. Таким образом, план релиза становится скользящим опережающим планом , который всегда отражает ожидания относительно нескольких новых итераций. Лауфер (Laufer, 1996) называет это «заглядывание вперед».
На рис. 18.1 показана ситуация, в которой команды обмениваются информацией между итерациями. Это менее рискованно, чем планирование на основе информации, передаваемой во время осуществления итерации. В начале очередной итерации каждая команда идентифицирует работу, которую она может выполнить, и принимает обязательства по ее выполнению. В случае, представленном на рис. 18.1, в начале третьей итерации команда 2 может принять полноценное обязательство по реализации пользовательской истории, связанной с данными по индивидуальным результатам, поскольку она знает о завершении API. Предположим вместо этого, что команда 2 планирует свою третью итерацию, когда API еще не разработан, а завершение работы над ним ожидается через несколько дней. Даже если бы команда 2 могла завершить историю, связанную с данными по индивидуальным результатам, без API в первый же день, ее обязательство было бы более шатким, и весь календарный график подвергся бы значительному риску. Командам нередко приходится принимать обязательства на основе результатов середины итерации. Тем не менее в той мере, в какой это возможно, им следует ограничиваться обязательствами, связанными с работами, которые завершены до начала очередной итерации.
Включение в план поддерживающих буферов
Для большинства команд в большинстве ситуаций скользящий опережающий план вполне уместен. Однако бывает, что взаимодействия команд настолько сложны или часты, что простого скользящего опережающего планирования, описанного в предыдущем разделе, недостаточно. В таких случаях первое, что нужно сделать, это попытаться сократить количество взаимодействий до уровня, при котором скользящее опережающее планирование станет реальным. Если добиться этого не удается, попробуйте включить в итерацию поддерживающий буфер , который даст свободу, необходимую другим командам. Поддерживающий буфер, как и временной буфер, описанный в предыдущей главе, защищает своевременную поставку набора новых возможностей. Это довольно сложный способ сказать простую вещь: если вашей команде требуется что-либо от моей команды к 8:00, то моей команде не следует планировать завершение этого на 7:59. Иначе говоря, нам нужен план вроде того, что представлен на рис. 18.2.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Agile: оценка и планирование проектов»
Представляем Вашему вниманию похожие книги на «Agile: оценка и планирование проектов» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.



Обсуждение, отзывы о книге «Agile: оценка и планирование проектов» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.